波士顿动力机器狗更新至2.0版,开发团队:我们所做的更有用了
Spot 机器狗是著名机器人公司 Boston Dynamics(波士顿动力) 最广为人知的产品之一,也是该公司探索将先进的机器人技术商用化的第一款产品。
2019 年下半年宣布商用不到 8 个月,现在,Boston Dynamics 为其升级到了 2.0 版本:软件功能的更新颇具亮点,硬件上的改进主要体现在处理湿滑的表面上有了更好的表现,而且对楼梯有了更好的理解(楼梯一直是腿足机器人的一大困难场景)。
(来源:Boston Dynamics)
根据 Boston Dynamics 官网对于 Spot2.0 的介绍,该产品现在具有更高的自主性,同时在通信、导航、有效载荷等功能上都有提升,并且更便于开发人员进行编程。
Boston Dynamics 一直表示,Spot 会被打造成一个模块化的平台产品,而不是只能在单一的场景下解决特定的任务。
正如此 Boston Dynamics 创始人 Marc Raibert 在接受 DeepTech 采访所表示:“我们要从技术研发公司变为产品公司,Boston Dynamics 目标是成为机器人界的 Android”,通过开放应用程序编程接口,合作伙伴可以在 Boston Dynamics 的产品中加上自己开发的应用,扩充机器人多样功能。比如让使用者能够增加硬件及软件,也就是通过实体的串连设计,使用者能够在机器人上增加各种他想要的功能,比如摄像头、无人机的 landing Pad 等。
从 2.0 版本的更新来看, Boston Dynamics 正在朝着该目标加速迈进,而且看得出来,这家以硬件上的动力学表现一骑绝尘的公司,在考虑商业落地之后,对软件的重视程度又有上升。

图丨 Spot 是波士顿动力第一个平台化的产品(来源:DeepTech)
5 大更新,自主导航成亮点
Boston Dynamics 列出了 5 项更新重点,分别是自主导航 API、移动性能、有效载荷、平台和其他扩展的开发人员功能。
自主导航 API 听起来或许没有让机器狗更好地爬楼梯那么令人兴奋,但极大扩展了 Spot 的自主导航能力,与 Boston Dynamics 让 Spot 完成商业应用的愿景一致:Spot 的应用场景将包括借助其强大的四足系统自主巡逻或者递运货物。
自主导航 API 的更新涉及两个部分,一个是名为“GraphNav API”:在此前版本中,该功能称为 Autowalk,但在 2.0 版本中,开发者可以访问 Autowalk 背后的高级自主导航行,并跟踪机器人在较大范围找那个的位置。开发者还可以自主记录、编辑地图并将其上传到导航系统中。
(来源:Boston Dynamics)
另一个部分则是“Missions API”:此 API 用于对自主操作进行开放性编程,Missions API 能与 GraphNav API 一起使用,将以允许用户实现更高的代码集成度,可用于自定义传感器和命令源。
Boston Dynamics 的首席机器人工程师 Zack Jackowski 对外媒 IEEE Specturm 表示:“我们对 Spot 的愿景一直是将其打造为移动平台。Spot 所做的就是可靠地将用户关心的货物送达目标位置,随着这个自主导航 API 的发布,我们终于实现了这件事。”
到目前为止,Spot 的自主性仍然基于一定程度的人工强化和复现上。用户需要先通过手动操作(通过平板电脑和操纵杆)驱动机器人,Spot 才能够记住并自主导航该特定路线,如果在自主导航过程中出现了新的障碍,需要对 Spot 进行重新规划。
这个优势既会使 Spot 与其它机器人平台区分开来,但是即使是对于有经验的用户来说,进行这种设置也不是一件容易的事。
对此,Boston Dynamics 创始人 Marc Raiber 表示:“我希望在大家眼中我们是一家移动平台公司,这也是我们对自己的定位。但随着我们最近在 Spot 上做的这一轮工作,适用范围已得到扩大,这种移动性更容易获得。”
这款机器人现在还可以通过基于决策树进行编程,以便用户可以将导航、感测和动作命令组合为一系列有用的行为。2.0 更新不仅让 Spot 具备了负载的能力,还提供了几种将有效载荷与机器人智能集成的方法,从而使系统具有更强大的功能。
“我们正在尝试做无聊的事情”
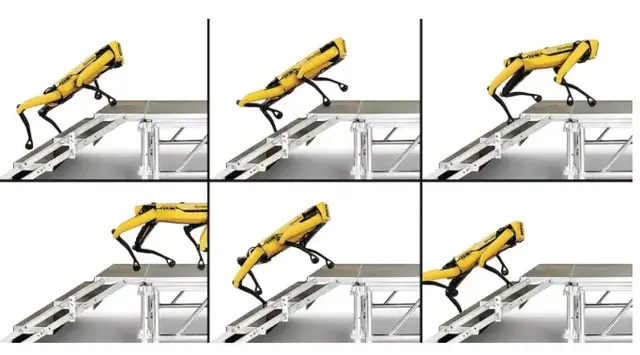
Spot 2.0 版本还包括一些重要的运动能力升级,可以帮助 Spot 在光滑的表面上更具灵活性,并且能够上楼梯,这对于 Spot 在其第一个商业部署环境——建筑工地——是很好的提升。
一些建筑工地有着非常光滑的高度抛光混凝土地板。如何在这种地面上避免滑倒或者滑倒后自行恢复,一直是 Boston Dynamics 试图解决的问题。
图丨 BigDog 在冰面上(来源:Boston Dynamics)
“事实证明,机器人身处建筑工地时,不能只是四处张开腿,” Jackowski 解释说,“人类滑倒时,人类需要认清自己正在滑倒,在你的腿还没滑出之前,你已经要滑倒。”
对于机器人来说,理想情况下,机器人应该能够理解它正在行走的表面的类型,并调整其移动方式以最大程度地减少滑动。但这一点特别棘手,因为 Spot 的 “小腿” 没有电机或传感器,但是现在控制系统可以在管理湿滑表面的同时,将滑倒幅度降到最低。
在爬楼梯的表现上,Spot 2.0 现在可以将楼梯准确识别为楼梯,而非怪异的山丘,并应用一些基本的语义知识来估算楼梯几何特征,从而使楼梯攀爬更加安全和可靠。例如,Spot 现在明白了楼梯通常会有规律地间隔开来,这意味着它可以将楼梯模型拟合到其映射和传感器数据中,并且可以更好地判断腿部的安全放置位置。
Raibert 认为,对楼梯处理能力的改进还将帮助 Spot 应对一些对于机器人来说颇为棘手的楼梯,特别是 Spot 的传感器还难以识别的带有格栅的楼梯和开放式楼梯。
从此前炫技式的后空翻到仅仅关注到爬楼梯这一寻常动作的诸多细节问题,Boston Dynamics 显然想要让作为首款商用产品的 Spot 在商业使用上更接地气一些。
图丨此前 Atlas 令人惊艳的后空翻(来源:Boston Dynamics)
Raibert 说:“我们真正专注于开发能够可靠地执行常规任务的机器人。” Jackowski 也表示,这听起来不是最令人兴奋的目标,特别是考虑到 Boston Dynamics 最为人所道和最擅长的技术,但与后空翻相比,这个目标更困难也更重要。
“我从加入到 Boston Dynamics 开始,从事了很多非常酷的动力学研究工作,但是从机器人产业的角度来看,让机器人产品发挥作用并真正具有实用价值所涉及到的问题同样有趣,而在许多情况下更具挑战性。”
Raibert 也同意这一点。“公司的历史就是尝试做不无聊的事情,但我们正在挑战这个新的方向——做无聊的事情,结果可能也是无聊的,但这正是人们的需求。(Our history is to try and do anything but be boring, but we’re trying to do something new for us—to do boring stuff and have the result be boring, because that’s what people need.)”
但他也强调,Boston Dynamics 会继续从事先进并且酷炫的研究,只不过这些不会是 Spot 2.0 的重点。
下一步: Spot 拥有头戴式手臂
根据 IEEE Specturm 的报道,Spot 接下来的一个醒目改动,将是在自己的头上加一个手臂。

(来源:Boston Dynamics)
图丨机器狗开门(来源:Boston Dynamics)
Raibert 预计头戴式操作手臂版本的 Spot 将于今年某个时候上市,这将使各种疯狂的新应用成为可能。此前的机器人曾经在视频中演示过开门的用途。
“操作手臂会带来许多新的功能和特性,而且难度不小。我们正在为此努力,特别是软件部分会很酷,其中一些功能将通过云端 AI 来实现”,他说。
“我希望将机器人提供给任何人,” Raibert 说。“我们现在的目标之一就是找出哪些它可以做,哪些它做不了,不仅会面向成熟的领域和客户,例如检查炼油厂或发电厂,而且还会开拓更多的可用性。”
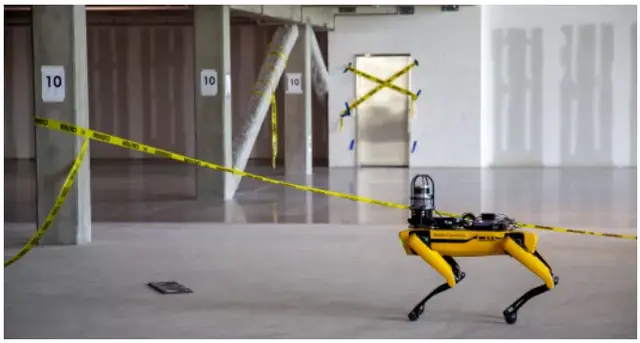
图丨 Spot 用于监控建筑工地(来源:网络)

图丨 Spot 宣布商用之后增加了户外拉车的技能(来源:网络)

图丨 10 只 Spot 拉动卡车(来源:网络)

图丨新冠疫情期间,新加坡碧山宏茂桥公园的Spot会巡逻兵反复播放保持适当社交距离的提醒(来源:网络)
不过到目前为止,我们仍然不知道 Spot 的价格。Raibert 唯一透露的是:“我们正在努力降低成本”。
现在,由于新冠疫情的爆发,大约有 35 个 Spot 被 Boston Dynamics 的工程师带回家中,以继续在新冠肺炎疫情期间保持生产和测试。


















评论