物理学家揭开炒饭的秘密
炒饭,几乎是每一家中餐馆的传统食物之一,而真正可口的炒饭需要「持续的高温」和「持续的翻炒」,最终制成一道美味的佳肴——烹饪过程总是与化学原理相关,但也经常涉及物理原理。
64.5%的中餐厅厨师在调查中称,调整翻勺正是导致该职业肩颈疼痛的核心原因之一。最近,来自乔治亚理工学院的物理学家教授David L. Hu和研究生Hungtang Ko,在《Royal Society: Interface》期刊发表了一篇论文《The physics of tossing fried rice》,他们设计出一套模型,用以解释炒饭的颠勺动作原理,希望帮助厨师减少重复劳动,介绍如何能制作出完美的炒饭。

炒饭的历史最早可追溯到1500年前。起初,在汉代(公元前206年至公元220年),颠勺的最初用途在于“烘干食物”,而非“烹饪食物”。而颠勺手法带来的高人气餐食之一,正是炒饭——这种色泽金黄诱人的食品,起源于1500年前的隋朝(公元581年至619年)。
颠勺,为人们带来了期待已久的焦香与锅气(镬气)。颠勺是一种褐变类型,只有在炒锅表面达到1000°C时,才会发生这种“美拉德反应”,即氨基酸与碳水化合物在高温下发生化学作用,从而导致肉类出现褐变。在高温下,厨师快速翻勺的动作能够确保米粒只发生褐变,而绝不致焦糊。
2018年夏季与2019年夏季,Ko与Hu先后在中国大陆以及中国台湾拍摄了五位专业厨师的炒饭过程,并从录像当中提取颠勺频率数据。(他们向受访者明确解释了录制素材的作用,即仅用于科学研究,绝不会在电视上公开放映)
在台湾的两家餐厅,厨师使用的炒锅重1.4公斤,宽39厘米,深13厘米。厨师们会烹制一份常规炒饭,主要成分包括大米、鸡蛋、猪肉、胡萝卜以及玉米,烹饪完成的炒饭重约0.3公斤。
在出锅之前,厨师们大概需要完成2分钟左右的炒制过程,平均每份炒饭需要颠勺276次,每次颠勺平均时长约0.3秒,具体步骤包括:预热炒锅,按顺序加入食材,用锅铲将食材混匀,翻勺颠炒。
在烹饪当中,翻勺颠炒的次数并不太多,只是偶尔出现。但在厨师加入所有食材之后,往往会连续进行五次颠炒,同时用锅铲将个别粘连在炒锅上的米粒除下。
整个过程的运行轨迹分两种:一种是,向前推动炒锅,并顺时针旋转,以接住颠勺腾空的米粒;另一种是,向后拉炒锅,以逆时针方式接住米粒。
本质上,炒饭相当于进行两种运行方向:平移(使米粒沿炒锅滑动),翻转(将米粒抛向空中)——“其中的要诀,是将灶台边缘作为活动支点。”另外,这两种运动具有相同的频率,但相位略有不同。

▲ 图:炒饭颠勺运动学。(a)在美国乔治亚州亚特兰大Chin Chin餐厅中,厨师正在进行颠勺,图片来源/Candler Hobbs;(b-e)显示颠勺过程中炒锅运动的图像序列,彩色的点显示出研究人员在视频中跟踪的点,注意,炒锅左端点沿顺时针方向行进,炒锅右端点则沿逆时针方向行进,两条轨迹皆标记为蓝色;炒锅中央位置的行动轨迹标记为红色,连杆摆动模型叠加在图像序列的上方,用以显示模型变量θ1与θ2的演变过程。
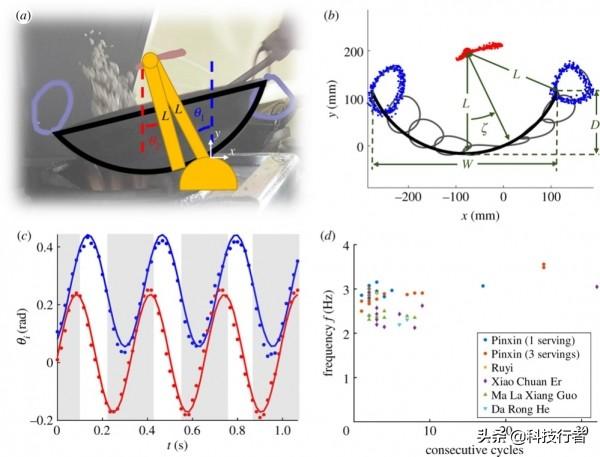
▲ 图:用于表达颠勺运动的数学模型。(a)展示数学模型示意图。(b)炒锅上各预设点的运动轨迹,在厨房坐标系中以灰色绘制。实验数据用蓝色实心点表示,模拟数据用灰线表示。炒锅最左侧与最右侧部分的运动轨迹,同模拟结果最为吻合。绿线定义炒锅参数。角度ζ 表示炒锅上的位置,角度区间从-ζmax到ζmax不等。常数L、D以及W分别代表炒锅的半径、深度与宽度。(c)摆角θ1 (red)与θ2 (blue)。各点表示实验,各线表示模型。灰色区域代表米粒在颠勺过程中的滞空阶段。(d)为炒饭过程中,五位专业厨师的各自颠炒次数,不同颜色代表不同厨师。
在确定了基本运动轨迹之后,Ko与Hu写道,事实证明,只需要两个变量就能准确模拟炒锅的运动,且运动轨迹可通过双连杆摆锤实现。
而由于厨师很少会在炒饭过程中将锅从炉子上取下,因此整套运作可以只涉及“单一滑动接触点”。他们的模型利用三项指标,基于弹丸运动特性,预测了炒饭过程中米粒的运动轨迹,分别为:抛掷起的米粒比例,米粒的飞行高度,以及米粒的角位移。
Hu解释道,在经过简化之后,整个运动轨迹类似于“翻转煎饼或者米粒杂耍”,其中的诀窍,在于炒锅内的温度可达到1200摄氏度,为了避免快速焦糊,厨师必须确保米粒不断离开锅体,以稍稍得到冷却,如此一来,米粒本身的水分将慢慢收干,而由此炒出的米饭既可充分褐变,但又不致焦糊。
根据Hu与Ko的分析,他们建议,厨师们进一步增加炒饭过程中的颠勺频率,以保证两种不同运动之间出现“相位滞后”——即尽可能让米粒的滞空时间更长,促进充分冷却与充分混合。
Hu与Ko希望,通过这套数学模型,可以总结出烹饪炒饭的最佳方案,并提出对现有炒锅结构加以改进的方法,更重要的一大目标在于,通过这项研究,衍生出颠勺机器人,以及厨师专用“可穿戴式外骨骼或者类似装置”,以减少厨师罹患肌肉拉伤的几率。
事实上,大多数亚洲美食均采用颠勺工艺,而在中式餐厅,厨师需要完成大量颠勺。长期以来,人们怀疑炒锅本身的重量加上操作速度,正是引发从业者高劳损几率的重要原因。在面向中式厨师的肌肉骨骼疾病研究中,炒锅成为经常被提及的“罪魁祸首”。2014年,炒锅被归纳为需要研究并调整设计工艺的几项核心风险因素之一。颠勺动作需要的精确肌肉活动并不确切,但很可能严重依赖于肩部。由于烹饪过程大量使用肩部发力,因此肩颈不适成为中式餐厅厨师群体中最常见的疾病之一,患病率高达64.5%,有九分之一的厨师因肩部不适而被迫选择离职。从这个角度来看,了解颠勺动作中的基本原理,将成为解析相关身体劳损难题的重要前提。
自上世纪五十年代以来,人们开始对烹饪自动化产生浓厚兴趣。最近几年出现的烹饪机器人技术研究,主要集中在利用机器人模仿人类厨师完成烹饪操作,例如切割、炖煮、油炸以及添加配料等。对于诸如翻转煎饼等动态任务,机器人也能够利用机器学习算法,快速掌握个中窍门。
也有人尝试实现炒饭的自动化,但目前来看效果不够理想。
一方面,大多数颠勺设备采用旋转,搅拌,或者摇动等方式,实现配料混合。1957年,Wang发明出一种搅拌机器人,能够利用旋转滚筒,以类似于洗衣机的方式实现配料混合;上世纪八十年代末,新的设计则开始引入自动搅拌工具,例如锅铲等;到九十年代,工程师们着手将这些方法结合起来,开发出一种“翻铲一体炒锅”,能够像翻转煎饼一样翻转食材,并利用自动锅铲,防止食材在高温下相互粘连。然而,虽然这类设备能够通过旋转或摇动实现食材的充分混合,但由于缺少颠勺环节,因此无法实现决定高温烹饪风味的谷物碳化过程。
另一方面,还有一些餐厅利用机器人准备食物,但效果依然差异。比如,一家位于美国马萨诸塞州波士顿市的餐厅Spyce,利用转筒以0.5 Hz的频率混合并加热中餐,能够将专业厨师的颠勺动作缩减至原先的六分之一——由于翻动速率较低,食物未能得到充分抛掷,因此有理由怀疑,这套设备需要降低炒锅温度以避免焦糊,但这同时也令美拉德反应变得无法实现;再比如,来自新加坡樟宜机场的Ruyi餐厅,他们于2014年展出了自己的最新颠勺机,然而尽管这台颠勺机将翻动频率提升到了2 Hz,但仍然不足以让食材如人工操作般得到充分抛掷。
Hu指出,“如果能开发出一种理想的自动化方案,可能会给厨师带来新的希望。”
该论文这项工作出自乔治亚理工学院David Hu实验室,作者为David L. Hu和研究生Hungtang Ko(Ko也是2019年一篇“关于火蚁集体建造木筏中的物理学原理论文”的联合作者)。该实验室主要对蚂蚁、水黾、蛇、各类爬行动物,蚊子,猫舌独特属性,以及动物体的排泄等活动特性开展研究,并凭借“关于袋熊为何会排出方形粪便”的研究获得2019年搞笑诺贝尔奖。

















评论