新加坡南洋理工开源!复杂环境中激光雷达SLAM的去噪和回环
以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容如何高效学习机器人SLAM?
点击领取学习资料 → 机器人SLAM学习资料大礼包
#论文# D-LC-Nets: Robust Denoising and Loop Closing Networks for LiDAR SLAM in Complicated Circumstances with Noisy Point Clouds
论文地址:https://ieeexplore.ieee.org/abstract/document/9981388/figures#figures
Github:GitHub - KangchengLiu/DLC_LiDAR_SLAM: Official Pro...
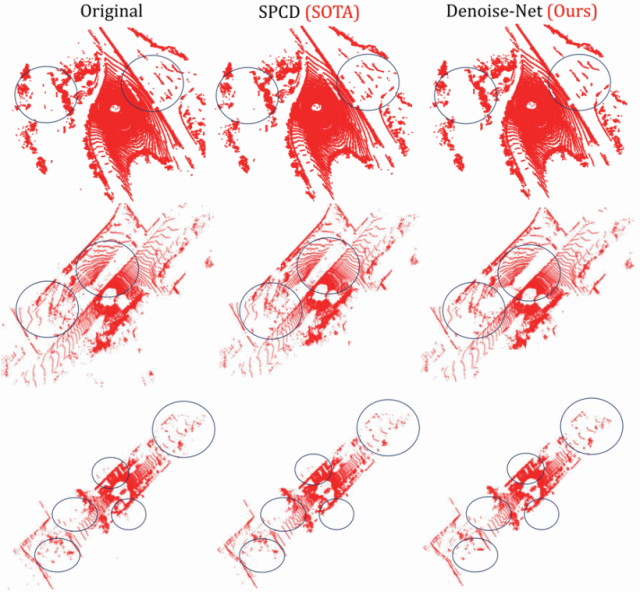
摘要:当前的LiDAR SLAM系统在面对复杂环境时精度较低、鲁棒性有限。通过实验,我们发现当前的LiDAR SLAM系统在获取的点云噪声较大时性能有限。因此,在本文中,我们提出了一个通用的框架来解决复杂环境中激光雷达SLAM的去噪和回环问题。现有的点云去噪方法主要针对小尺度点云进行设计,无法推广到大尺度点云场景。
在这项工作中,我们首先提出了一种用于大规模点云去噪的轻量级网络。随后,我们还设计了一个高效的闭环网络用于全局优化中的位置识别,以提高整个系统的定位精度。最后,我们通过大量的实验和基准研究证明,我们的方法可以在面对噪声点云时对LiDAR SLAM系统的定位精度有显著的提升,同时计算成本略有增加。
本文贡献如下:
1. 我们提出了一种轻量级网络用于SLAM中的局部地图去噪。我们提出了具体的设计,包括基于双尺度CNN的特征提取和基于RNN的特征融合,实现了准确的去噪。
2. 我们提出了一种有效的闭环网络来提高定位精度和鲁棒性。分类和回归损失都是为了提取地物特征,并发现两次LiDAR扫描的方向偏差。实验证明了其有效性。
3. 我们将所提出的方法与固态激光雷达( Livox- AVIA )和机械式激光雷达( VLP- 16 )集成到我们的系统中。在具有挑战性的基准和真实环境中,包括花园和有玻璃反射强光的走廊情况下,取得了令人满意的性能。这表明我们的方法在有效性和效率方面具有明显的优势。





以上内容来自小六的机器人SLAM学习圈 每日更新内容如何高效学习机器人SLAM?