ROSCon2017第二天见闻
在前一天的会议中,总共进行了2场40分钟演讲、9场20分钟演讲、11个5分钟演讲和15个闪电演讲(3分钟),讨论的主题涵盖了ROS无人驾驶、ROS2.0、ROS开发工具、安全性等方面。汤尼机器人团队有幸获得了20分钟演讲的宝贵机会,成为唯一一个在ROSCon发表演讲的中国团队。
汤尼机器人还独家承担了ROSCon全球视频直播的服务,在两天的会议中总共有2000多个(独立IP访客)来自全球的ROS开发者观看了直播并进行现场互动,观看次数(PV量)达到了5000多。
会议组织方喜出望外( “it’s amazing!”, “unbelievable!” )多次当面表示了赞许和感谢,并在会议间隙不间断的给TR打广告。

上午9点整,第一场演讲开始。这是一个40分钟演讲,来自捷克理工大学、瑞典皇家理工学院、瑞士苏黎世联邦理工大学的研究者,一起介绍了用ROS框架构建的救援机器人项目——TRADR。TRADR是由欧盟第七框架(EU FP7 Programme)支持的项目:长期的人/机器人灾难应急小组。整个系统包括UGV、UAV、人类小组,并提供一套软件保证机器人与人之间的合作。系统总共使用了100多个ROS包,所以如何对这些包进行管理成为了一个挑战,他们用Git进行管理,并将不同的包分布在不同的机器上。为了解决无线网络传输中数据量大的问题,他们还在Wifi层之上封装了一层Nimbro Network。他们设计了一款可视化程序,能够监测并显示所有节点的运行情况。他们可以在Gazebo中对履带式机器人进行仿真,并可以记录仿真数据,用于后续的增强学习(Reinforcement Learning)算法。针对学习算法,他们做了一个可以在ROS中调用TensorFlow的工具。另外他们介绍了自己进行环境感知用到的各类传感器,还发布了多机模式下的3D建图和导航算法。这个系统应用到了2016年意大利Ametrice的地震救援中,对受害区域内的建筑进行了建模。


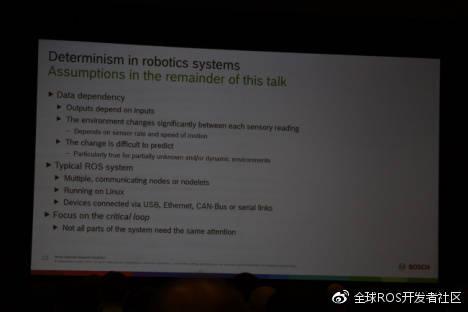
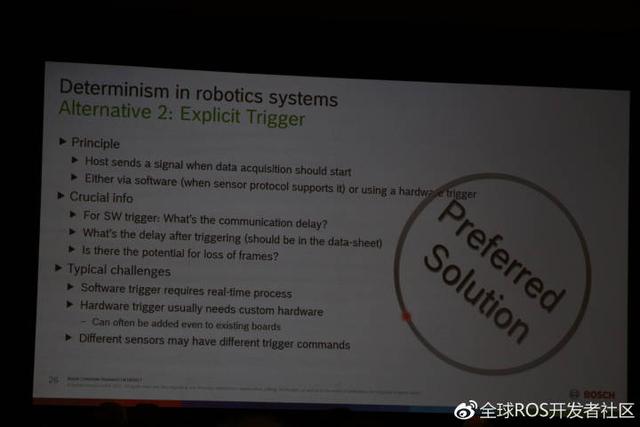
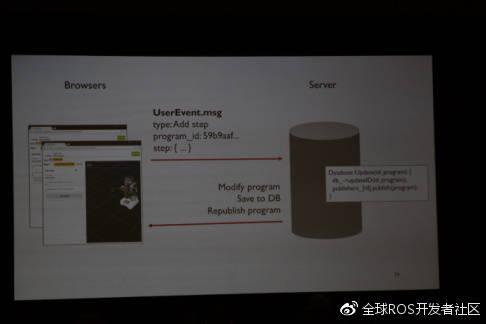
第二场也是40分钟演讲,演讲者来自德国博世(Bosch)公司,讨论了机器人软件中的Determinism问题,也就是所有起始条件和输入都确定的情况下,结果是不是确定的问题。这个在机器人中是很重要的,因为许多行为的执行顺序可能因此而变化,造成机器人异常。他们以ROS中的move_base节点进行了分析。他们在相同的条件下进行多次实验,发现从激光信号/scan输入,到计算并输出/cmd_vel速度控制指令的时间延迟,每次实验差异都很大。他们对ROS中的订阅发布机制深入研究后,提出了解决方法,即通过显示触发的方式来获取传感器数据,以保证时间的同步,极大地改善了这一问题。
接下来是30分钟的茶歇时间。
茶歇结束,之后的演讲一直到会议结束就都是20分钟演讲了。
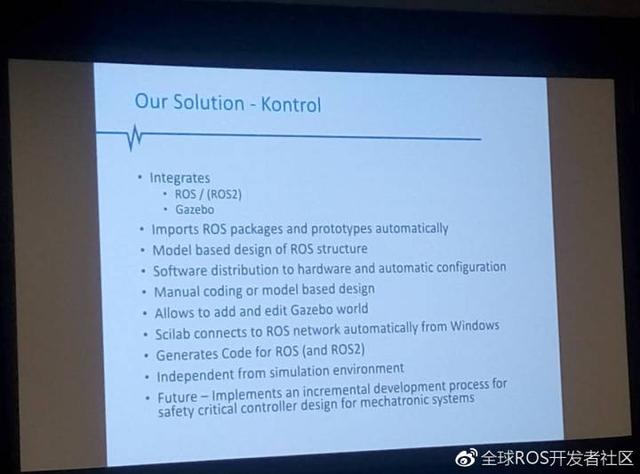
第一个20分钟演讲是来自奥地利的Kontrol公司。他们分析了对安全苛求的控制器进行开发的通常流程,发现大量的时间耗费在了串行开发阶段。为了提高开发效率,他们提出了基于ROS和Gazebo的开发方式,称为“Kontrol”开发环境。能够导入ROS包并进行模块化开发,并能生成ROS代码。
第二个,来自Rethink Robotics的软件工程师介绍了ROS在web上的工具——rosnodejs,并用在了他们最新的机器人软件平台Intera 5上。他们称,rosnodejs可以实现roscore的所有功能,比如订阅、发布、服务、日志、消息生成等等,并给出了源代码示例,跟C++和Python版的风格保持一致,非常易读。目前rosnodejs还是存在局限的,在浏览器中运行时还需要加一层Bridge。最后在Chrome浏览器中展示了UI运行效果。

第三个也是关于ROS和web的,演讲者是来自华盛顿大学的。他们利用Polymer,一个基于JavaScript的web组件开发库,构建了ROS的web组件,并用这些ROS组件开发了web版本的RViz和机器人配置界面。这一技术具体应用在了Fetch Robotics的产品中。
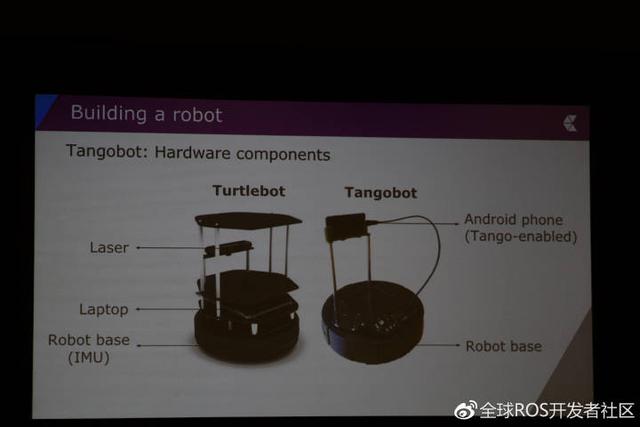
第四个是关于ROS和Android的,演讲者来自阿根廷Ekumen实验室。他们利用ROSJava库和Android NDK,在Google Tango手机上进行开发,并构建了一个称为“Tangobot”的自主导航机器人,该机器人完全用Android控制,硬件采用的是Google Tango与Kobuki底盘。
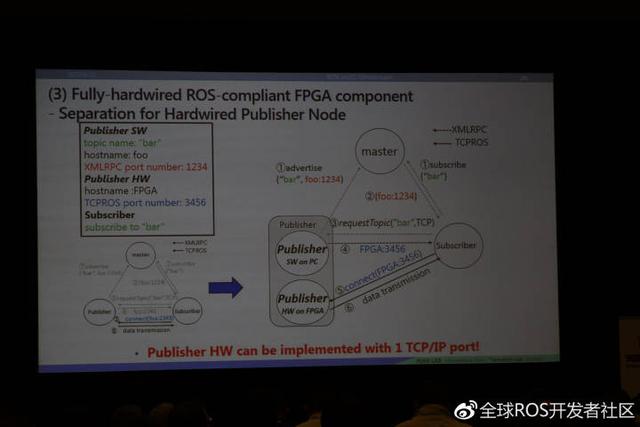
第五个是来自日本的研究者,介绍了将FPGA做成一个ROS节点来提高计算性能。他们研究的动机是FPGA强大的计算能力,尤其是在图像识别,特别是深度学习领域具有很大计算优势,但FPGA开发起来却很难。通过将ROS的通信协议硬件画,可以将FPGA做成一个ROS节点,并在上面运算基于深度学习的物体识别算法、视觉SLAM算法。
随后,Brian进行了现场抽奖,获奖观众一一领奖。
至此,上午的演讲结束了。大家开始午餐。
下午还有7场20分钟演讲和1场闪电演讲。2点整,演讲开始。
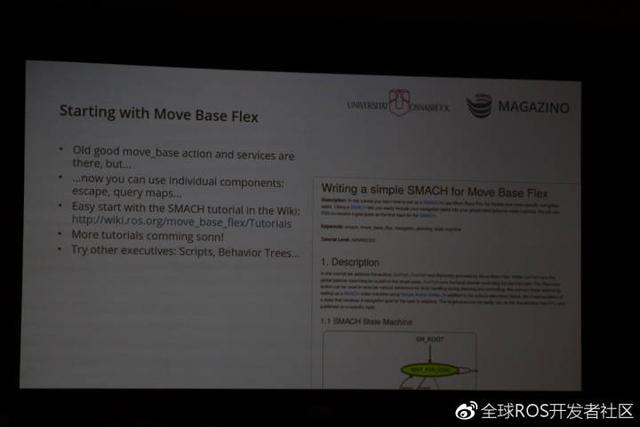
第一个演讲者来自德国奥斯纳布吕克大学和Magazino公司,他们介绍了一个称为“Move Base Flex”的框架,开发起来更加灵活。目前的move_base包是不灵活动,可以看成是Move Base Flex的一种具体实现。Move Base Flex既能兼容move_base,又可以将导航的抽象层和具体实现层分开。Magazino已经将其用于自己的“TORU”机器人产品中。
第二个演讲的是来自美国Locus Robotics的David Lu。现在ROS中的局部路径规划算法dwa_local_planner是作为一个整体存在的,David Lu则将其模块化了,其中的每一个功能都封装成模块,并以插件的形式存在,这样更加简介清晰,他将其称为“dwa_local_planner”。

第三个演讲的是来自PAL Robotics工程师,介绍了如何用ROS开发整个机器人产品。PAL公司的系列产品中,无论是底盘还是人形机器人,采用都是ROS,这样可以缩短产品的上市周期,并能借助整个ROS社区的力量。PAL介绍了他们的ROS开发、部署平台,并演示了进行机器人全身控制的效果。
接下来是闪电演讲时间,一共有15个演讲者,每个演讲时间控制在3分钟内。分别介绍了RTI DDS和ROS、微型激光测距仪Terabee、FlatLand 2D机器人仿真器、日本团队零基础7个月内参加Amazon Robotics Challenge并获奖、PAL Robotics的TIAGo机器人、加拿大约克大学的行人跟随机器人、TurtleBot3、Intuitive Surgical公司的达芬奇手术机器人SDK、ARM上的ROS2.0等。

闪电演讲后,是半小时的茶歇时间。
下午第四个演讲的是美国西南研究院、德国弗劳恩霍夫制造技术与自动化研究所和新加坡先进再制造和技术中心的研究者,他们介绍了ROS-Industrial发展状况。ROS-I得到了美国、德国和新加坡当地政府的资助,目前已形成了包含50多个组织机构的联盟,涵盖了系统集成商和制造业巨头。ROS-I计划在亚太地区成立开发团队,让更多系统集成商参与进来。
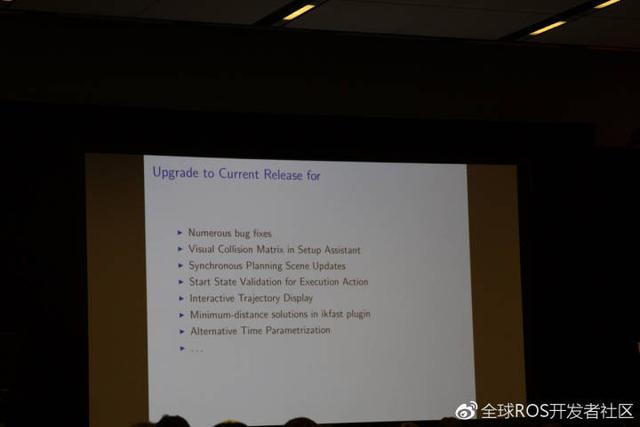
下午第五个演讲的是来自德国汉堡大学的研究者,他们介绍了MoveIt最新版本的特性。MoveIt更新迭代很快,最新版修复了很多Bug,并增加了很多新功能。新加入的bioik插件能够允许对多种约束类型组合,大大提高了灵活性。并将在今年10月18日举行“World MoveIt Day”。
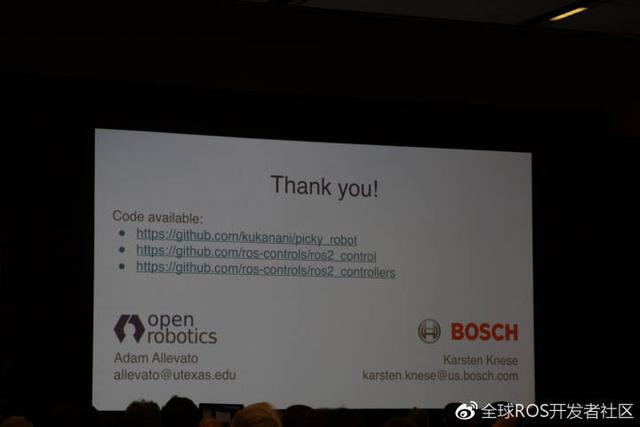
下午第六个演讲的是来自Open Robotics和德国Bosch的工程师。他们演示了工业机器人如何用ROS2.0实现基于视觉的抓取,演示采用了ABB的机械臂,深度相机用的Orbbec Astra。
本届大会最后一个演讲的是英国Shadow Robot公司的首席技术架构师,介绍了他们构建的沙箱,可以训练机器人抓取。沙箱采用了Docker容器,通过仿真随机抓取来构建训练数据,用Keras和TensorFlow进行训练,最后演示学习效果。

最后,Open Robotics的董事会主席Ryan Gariepy致闭幕词,感谢大会组织人员和所有参与者,并特别感谢了汤尼机器人提供了本次大会的视频直播服务。