新加坡科技大学研发不用电的无人机,通过平衡风力控制落点

导语:近日,新加坡科技大学的机器人专家公布了一种新型的仿生无人机,可以借助风力降落在指定位置,无需电力提供动能。
智东西7月9日消息,近日,新加坡科技大学的机器人专家在IEEE Robotics and Automation Letters上发表了一篇新论文,介绍了他们研发的新型无人机,这种无人机由5架单独的无人机连接在一起,在接近地面时,驱动翼控制它们彼此分离,分别降落在各自的目标地点。
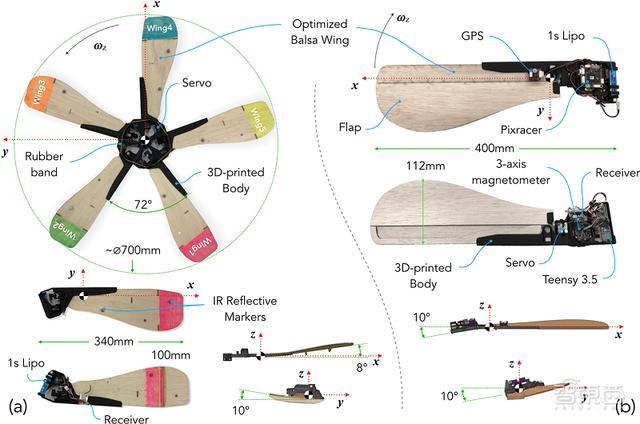
这种设计的特点是,无人机不再需要电力提供动能,在下降的初始阶段,5架无人机借助风力协同自转,几个机翼相互连接,形成一个旋转中心。
多架无人机组合的形式,能够实现更高的旋转动能和协同控制能力。合体无人机接近地面后,它们就可以退出协作模式,继续下降各自特定的目的地。
一、无人机分离后降落在指定位置
传统的固定翼和四旋翼无人机结构相对复杂,价格也比较昂贵。当需要使用“一次性”无人机来完成某些工作时,固定翼和四旋翼无人机的成本就太高了,只使用一次也会造成很大的资源浪费。
研究人员从枫叶和翅果(翅果,又称翼果,翅果的形状使得风能够将果实带到离母树很远的地方。)随风飘落的状态找到了灵感,设计出了简单的滑翔机式无人机。
枫叶和翅果的共同特点是,能够随着风旋转飘落到地面,翅果的叶子就像几个可以旋转的翅膀,但它的下落过程是不能控制方向的,风往哪里吹就降落在哪里。
借助翅果的特点制作无人机时,增加一个驱动翼,在正确的时机启动它,就可以控制无人机落地的方向,瞄准地面上特定的点。当无人机到达指定位置后,五架单独的“翅果”无人机就会同时分离,飞到各自的指定位置完成任务。
二、5架无人机协作控制飞行平衡
想要使无人机在空中飞行的过程中转向不难实现,但很难做到稳定和精确控制。在研究人员发表的论文中,他们找到了解决无人机稳定转向问题的办法,就是同时使用5架无人机保持飞行的平衡。
目前,研究人员正在计划改进这种小型无人机的设计,提高单架无人机和多翼协同无人机的旋转速度和控制性能。
三、“翅果”无人机能够软着陆
每架无人机机翼的一部分,形成一个襟翼(特指现代机翼边缘部分的一种翼面形可动装置,其基本效用是在飞行中增加升力),可以在协同模式下同时启动,有更好的机动性,将无人机的垂直和水平速度控制在一定程度上,导航到目标位置时轻轻的着陆。“翅果”无人机的设计就像一个空中有效载荷的减速器,就像降落伞一样,它能确保从飞机上扔出去的东西完好无损的到达地面,不会在落地时被撞的粉碎。
翅果自动机翼无人机,可以携带小型的物品飞行,比如紧急医疗物品。视频中的小型翅果无人机能够额外负重30克,虽然没有固定翼滑翔机的容量大,但它们能够垂直下降,比降落伞更好控制。
结语:仿生无人机或将用于救灾工作
新加坡科技大学的机器人专家,从植物的飘落中找到无人机的设计灵感,研发出了能控制降落地点的仿生无人机。这种无人机的设计能够帮助运输小型物品,比如在救灾过程中,可以将紧急的医疗物品准确的送到指定地点,并保证运送物品完好无损。
研发人员正在完善这种小型仿生无人机的设计,提高控制性能,未来,这种仿生无人机或将能够在救灾、救援工作中发挥巨大作用。




















评论