南大团队在谷歌Waymo自动驾驶挑战赛中取得佳绩
6月20日,CVPR 2021自动驾驶研讨会(Workshop on Autonomous driving)揭晓了本年度谷歌无人驾驶公司Waymo开放数据集挑战赛的最终结果。南洋理工大学的代表团队在该项比赛中获得了两项最高奖项。
Waymo开放数据集挑战赛
作为全球自动驾驶公司王者,2020年3月,Waymo首次在CVPR自动驾驶研讨会期间举办Waymo开放数据集挑战赛,宗旨是以模型导向,以算法为王。Waymo首席科学家兼项目负责人Drago Anguelov表示:“我们的数据集是有史以来规模最大、场景最丰富、最多样化的自动驾驶数据集之一。”

来源:waymo
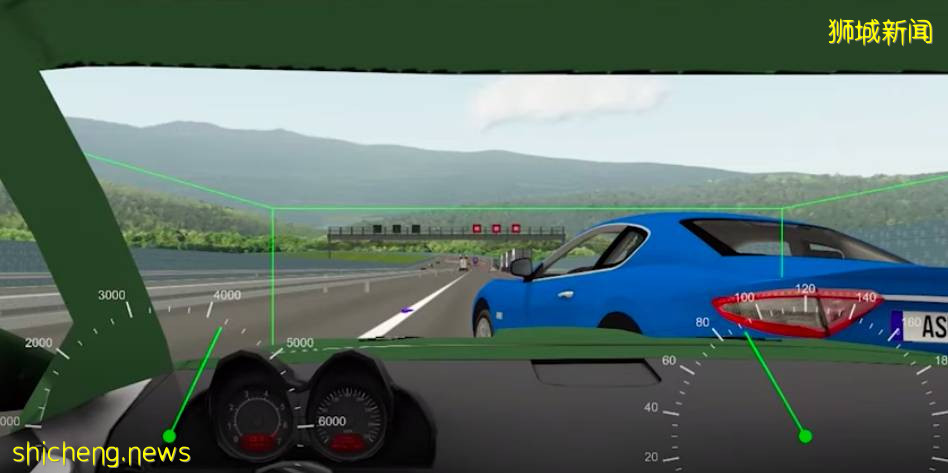
作为自动驾驶领域中算法研发方面最著名的国际性大赛,本届Waymo开放数据集挑战赛旨在鼓励对感知与行为预测进行新的研究。为此,Waymo开放了其自动驾驶车辆在25个城市收集的超过1000万英里、570个小时的自动驾驶道路数据,超10万个城市真实场景。大赛吸引了包括清华、滴滴、赛灵思、伯克利、德克萨斯大学、南洋理工大学等在内的30余支学术界和产业界顶尖自动驾驶研发团队的参与。
为了解计算机视觉算法在解决自动驾驶环境感知问题方面的现状,主办方提出了两个挑战,准备了由Waymo和Argo-AI收集和注释的大规模数据集。基于这些数据集定义了许多现实问题,鼓励业界为自动驾驶发明新的算法。

来源:waymo
Waymo开放数据集挑战赛共设四个现场项目,包括实时2D检测、实时3D检测、动态预测及关联预测。
实时3D检测:给定三幅激光雷达测距图像和相关摄像头图像,为场景中的对象生成一组3D直立框。
实时2D检测:给定一组摄像头图像,为场景中的对象生成一组2D框,有延迟要求。
运动预测挑战:给定实体(agent)对应地图上过去1秒的轨迹,在未来的8秒钟内预测最多8个实体的位置。
交互预测挑战:给定实体在对应地图上过去1秒的轨迹,预测2个交互实体在未来8秒内的共同未来位置。
南大赢得两项最高奖项

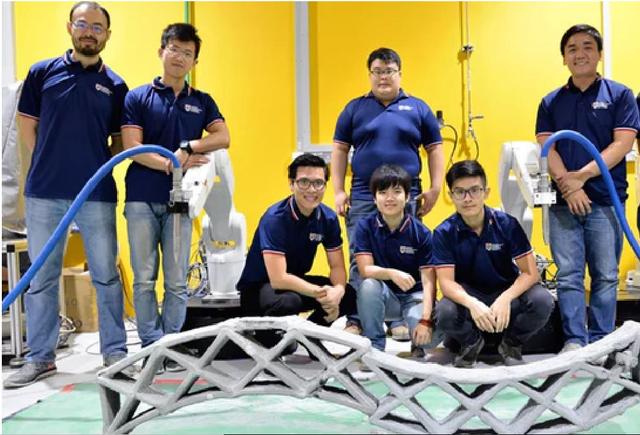
获奖团队,来源:NTU官网
在交互预测挑战中,南洋理工大学是唯一的冠军获奖队伍,力压其他的实力参赛团队。在运动预测挑战赛中,南洋理工大学排名第二,仅次于清华大学。
南大团队目前正寻求将其技术整合到 NTU-Volvo 全尺寸自动驾驶电动巴士中,并在自动驾驶汽车测试与研究卓越中心进行试验。
来源:NTU官网
开发未来移动解决方案是南大 2025 战略计划的一部分,该计划旨在通过研究解决技术对人类的影响。这些未来的移动技术是在南大智能校园开发和测试的,这是一个创新数字和技术支持解决方案的现场试验台,支持更好的学习和生活体验。
参考文献:
1. "Twin win at Google’s Waymo autonomous driving competition" NTU Media Release;













评论