2019ICRA基于Deep Learning 的SLAM最新算法汇总
我们总结了ICRA 2019 SLAM相关论文,分为四个部分:
- 深度学习+传统SLAM
- 传统的SLAM / 3D视觉
- 基于深度学习的SLAM
- SLAM评估和数据集
本文介绍:基于深度学习的SLAM
1.E2E-VO/ SLAM
GEN-SLAM:单目同时定位和映射的生成建模
关键词:SLAM,本地化,基于视觉的导航

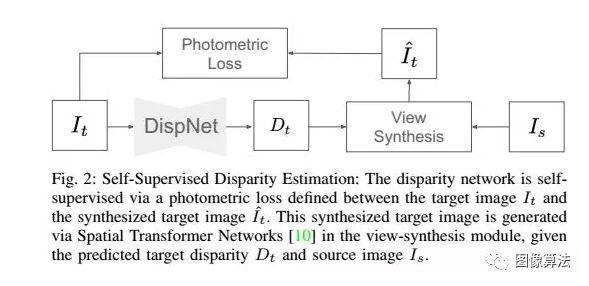
超越自我监督自我运动估计的光度损失(深度学习,自我监督深度和里程表,参考GeoNet和SfmLearner)
关键词:SLAM,视觉学习,本地化
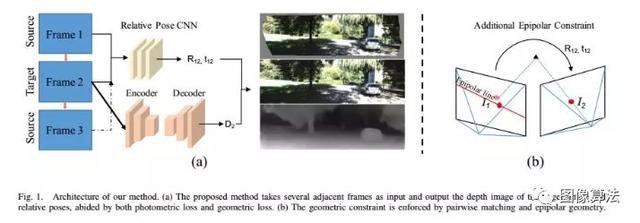
源码地址:https://github.com/hlzz/DeepMatchVO
通过几何意识课程学习学习单目视觉测距
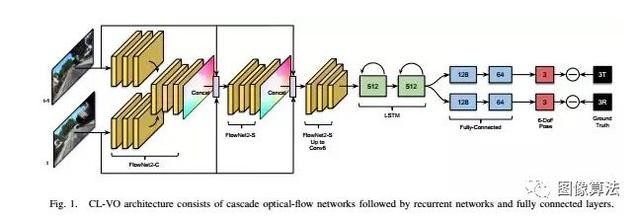
关键词:本地化,视觉学习,机器人深度学习和自动化
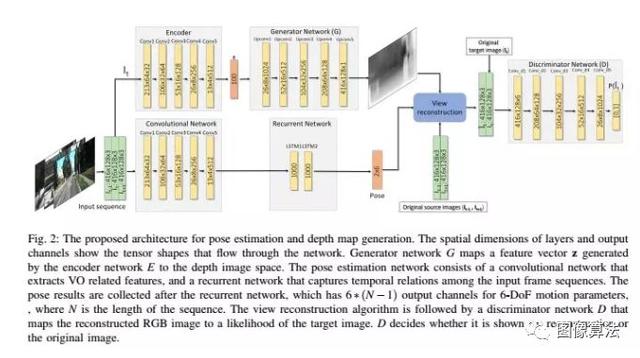
GANVO:无监督深度单眼视觉测距和生成性对抗网络的深度估计
关键词:机器人深度学习与自动化,本地化,视觉跟踪
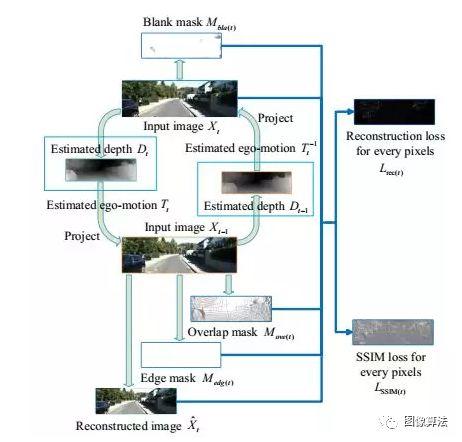
使用多个掩模进行单眼深度和自我运动的无监督学习
关键词:机器人深度学习与自动化,SLAM
2. E2E Navigation
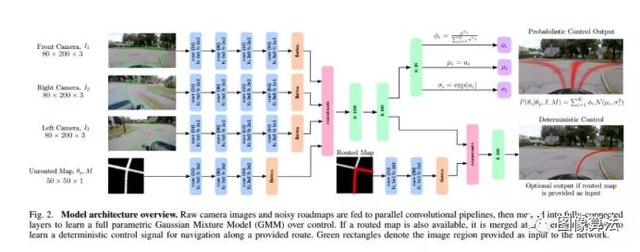
(AWARD)变分端到端导航和本地化
关键词:机器人与自动化深度学习,交通计算机视觉,自主车辆导航
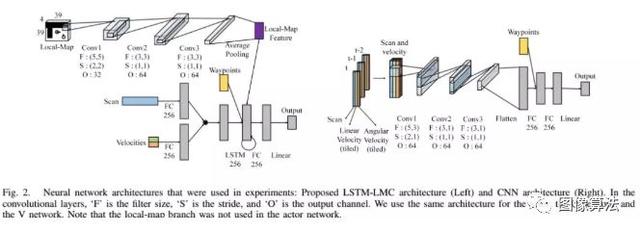
具有有限视野的复杂拥挤环境下的导航深度学习
关键词:机器人深度学习与自动化,避碰,服务机器人
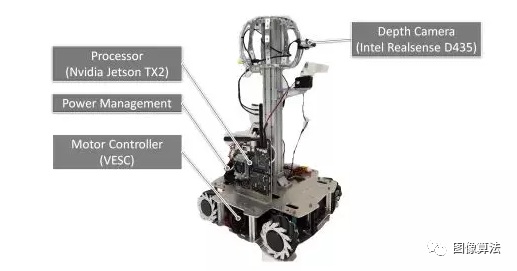
通过仿真推广:将模拟和实际数据集成到基于视觉的自主飞行的深度强化学习中
关键词:机器人深度学习与自动化
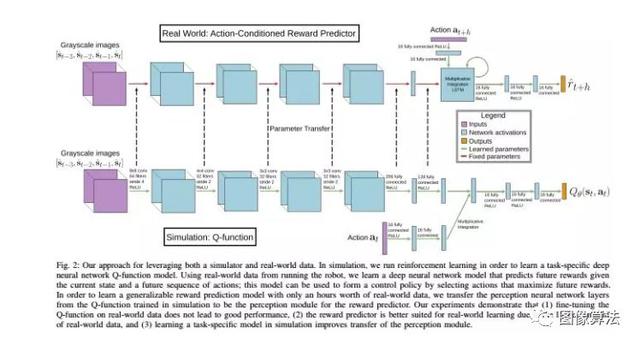
源码地址:https://github.com/gkahn13/GtS
3.Feature & VPR
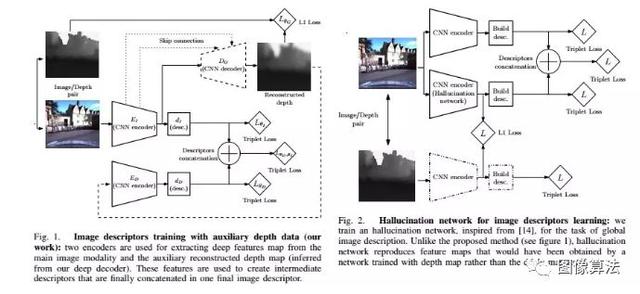
(AWARD)学习场景几何在挑战条件下进行视觉定位
关键词:本地化,RGB-D感知,其他机器人应用的计算机视觉
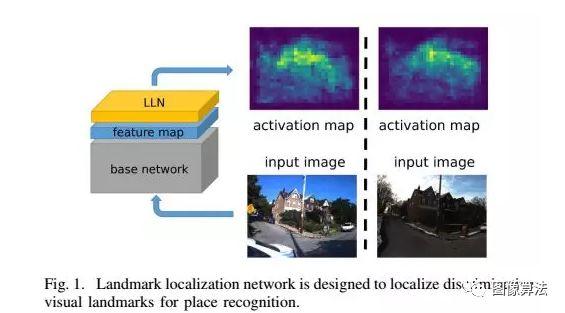
定位区域识别的判别性视觉标记
关键词:本地化,可视化导航,自动化计算机视觉
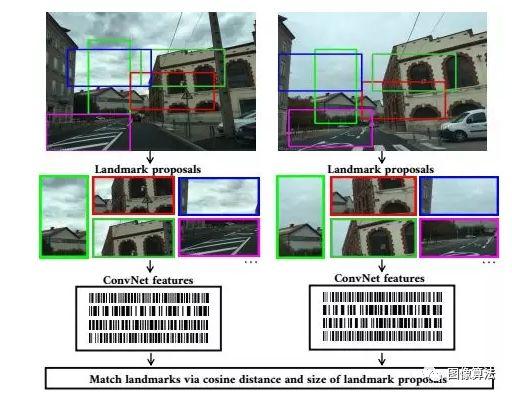
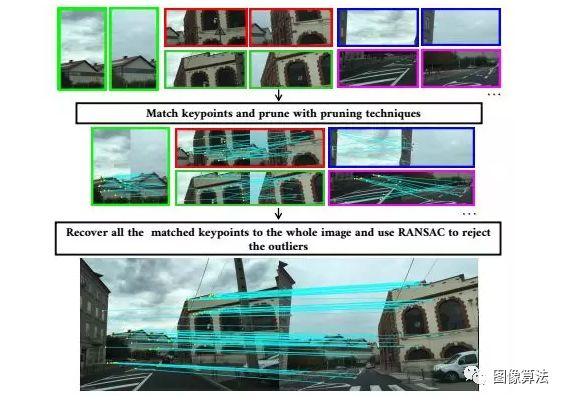
利用基于地标的图像表示改进关键点匹配
关键词:SLAM,本地化
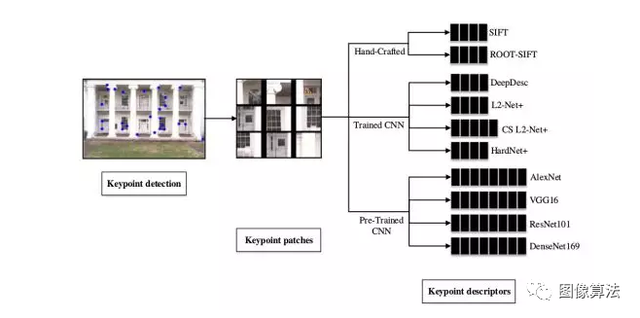
基于CNN和手工制作的关键点描述符的比较
关键词:SLAM,基于视觉的导航,机器人深度学习和自动化
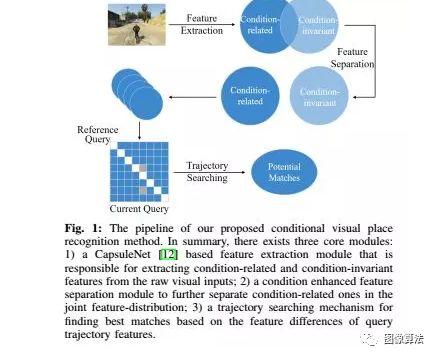
一种用于视觉位置识别的多域特征学习方法
关键词:本地化,SLAM,绩效评估和基准测试
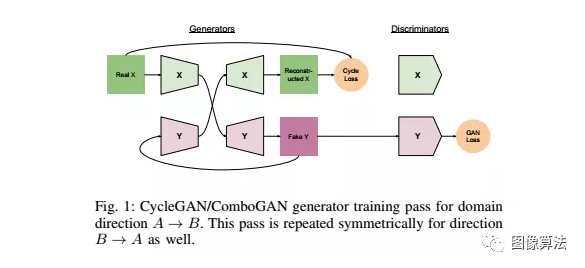
基于检索的本地化的日常图像翻译
关键词:本地化,视觉学习,自主车辆导航
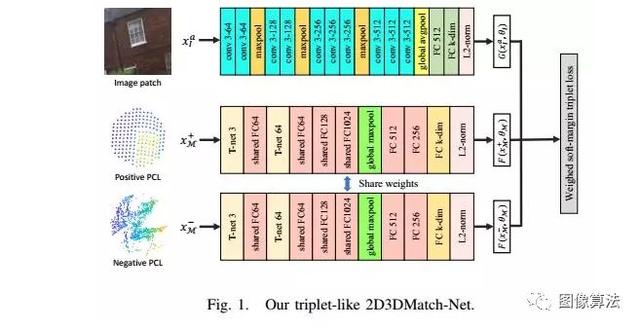
2D3D-MatchNet:学习匹配2D图像和3D点云的关键点
冯孟丹新加坡国立大学
关键词:机器人与自动化深度学习,视觉学习,本土化
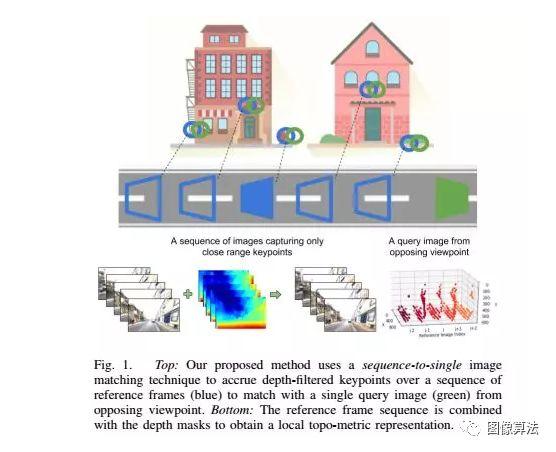
看不深:使用单视图深度估计识别不同场景外观下相反视点的位置
关键词:本地化,机器人深度学习和自动化
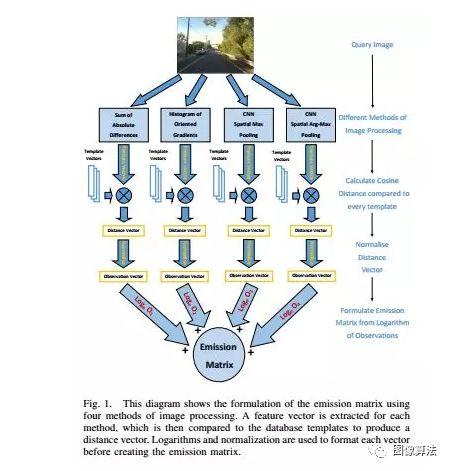
多进程融合:使用多种图像处理方法的视觉位置识别 - IRAL
关键词:本地化,基于可视化的导航
4.Depth & Disparity
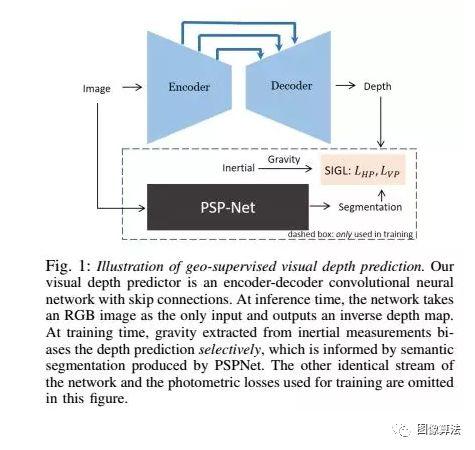
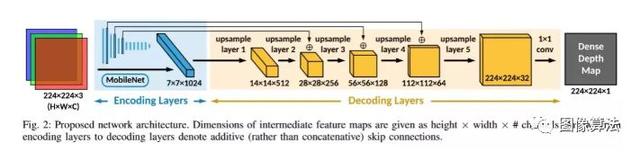
(AWARD)地理监督视觉深度预测
关键词:视觉学习,传感器融合
源码地址:https://github.com/feixh/GeoSup
FastDepth:嵌入式系统的快速单目深度估计
关键词:机器人和自动化深度学习,范围感知,其他机器人应用的计算机视觉
源码地址:https://github.com/dwofk/fast-depth
SuperDepth:自我监督,超分辨率单眼深度估计
关键词:机器人与自动化深度学习,视觉学习,Mappin
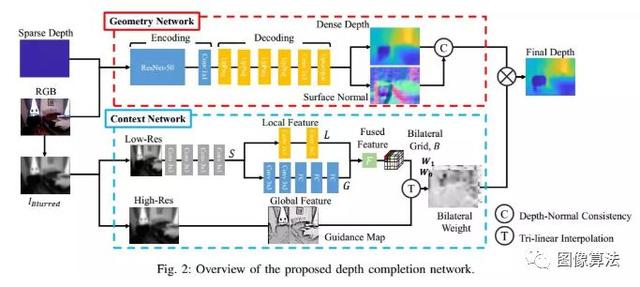
深度几何和上下文指导的深度完成
关键词:RGB-D感知,其他机器人应用的计算机视觉
自监督稀疏 - 密集:LiDAR和单目相机的自监督深度完成
关键词:视觉学习,RGB-D感知,传感器融合
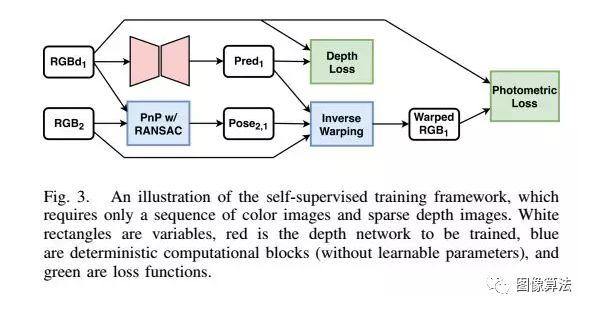
源码地址:https://github.com/fangchangma/self-supervised-depth-completion
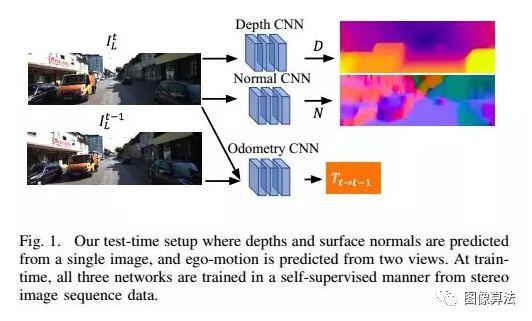
单视图深度和表面法线估计的自监督学习
关键词:机器人与自动化深度学习,视觉学习,制图
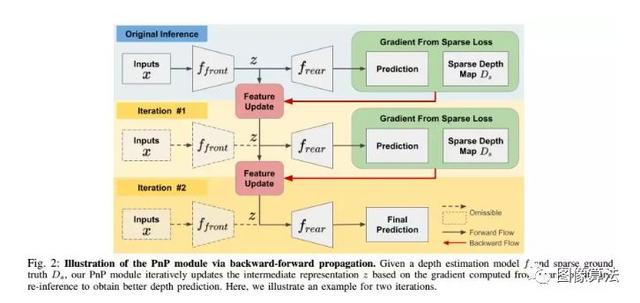
即插即用:通过稀疏数据传播改善深度预测
关键词:机器人与自动化深度学习,RGB-D感知,自动化计算机视觉
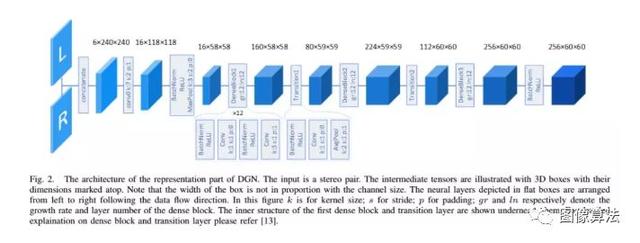
深度生成网络:从立体和深度图像估计真实世界深度
关键词:基于人工智能的方法,RGB-D感知,范围感知
任何时候移动设备上的立体图像深度估计
关键词:机器人与自动化深度学习,自动化计算机视觉,其他机器人应用的计算机视觉
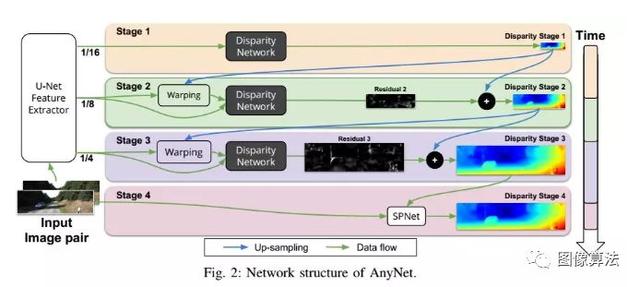
源码地址:https://github.com/mileyan/AnyNet
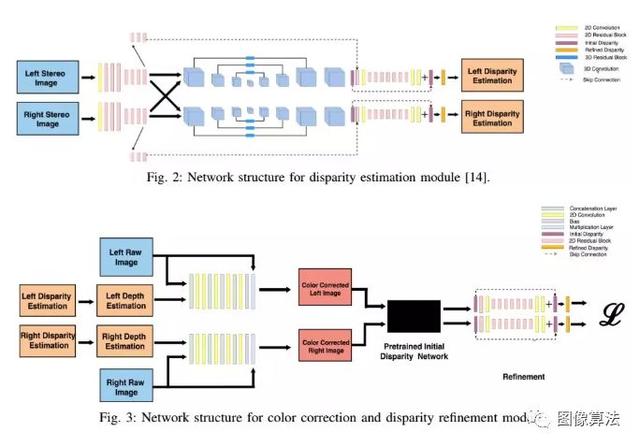
UWStereoNet:用于水下立体图像深度估计和颜色校正的无监督学习
关键词:海洋机器人,机器人和自动化深度学习,其他机器人应用的计算机视觉
基于非对称注释的实时联合语义分割和深度估计
关键词:视觉学习,语义场景理解,SLAM
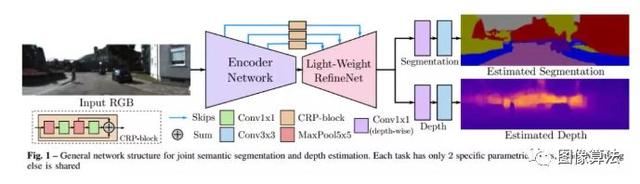
源码地址:https://github.com/DrSleep/multi-task-refinenet
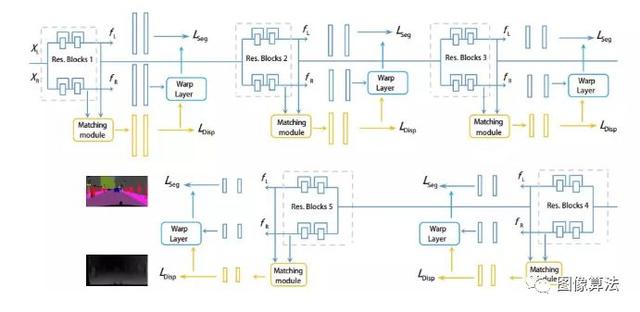
DSNet:用于场景分割和视差估计的联合学习
关键词:语义场景理解,机器人和自动化中的深度学习,对象检测,分割和分类
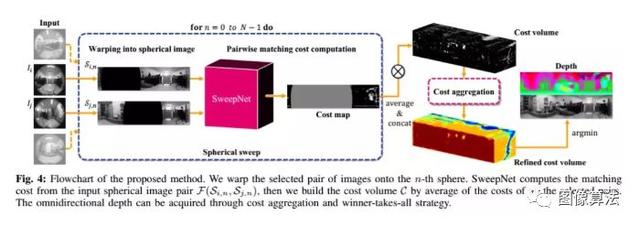
SweepNet:宽基线全向深度估计
关键词:全方位视觉,自动化计算机视觉,机器人深度学习和自动化
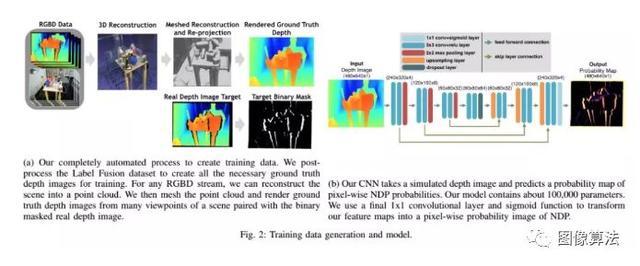
一种预测深度图像噪声的监督方法
关键词:RGB-D感知,掌握和操纵感知,机器人深度学习和自动化
5. Point Cloud Segmentation
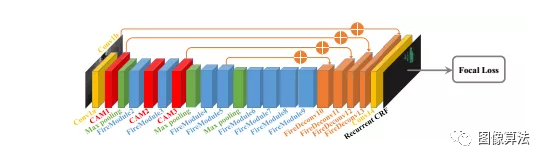
SqueezeSegV2:改进的模型结构和无监督的域适应,用于从LiDAR点云进行道路 - 物体分割
关键词:对象检测,分割和分类,语义场景理解,基于AI的方法
源码地址:
https://github.com/BichenWuUCB/SqueezeSeg
https://github.com/xuanyuzhou98/SqueezeSegV2
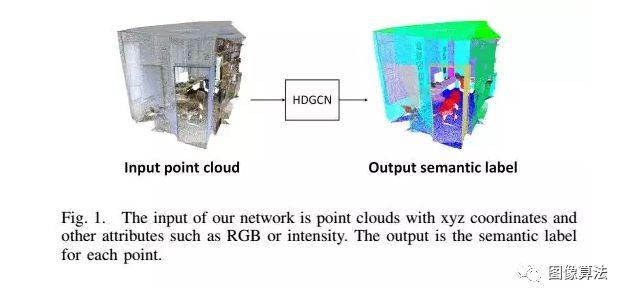
用于点云三维语义分割的分层深度图卷积神经网络
关键词:语义场景理解,基于AI的方法,RGB-D感知
6. Autonomous Vehicle
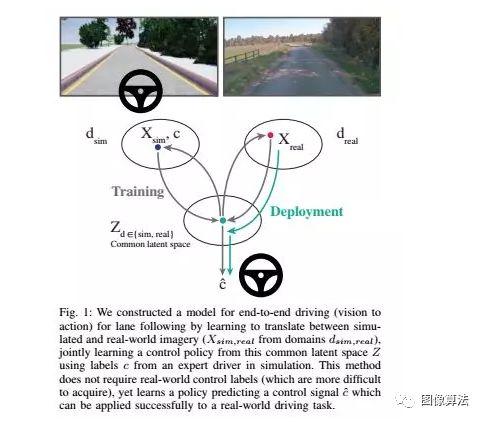
学习从没有真实世界标签的模拟开车
关键词:机器人与自动化深度学习,视觉学习,示范学习
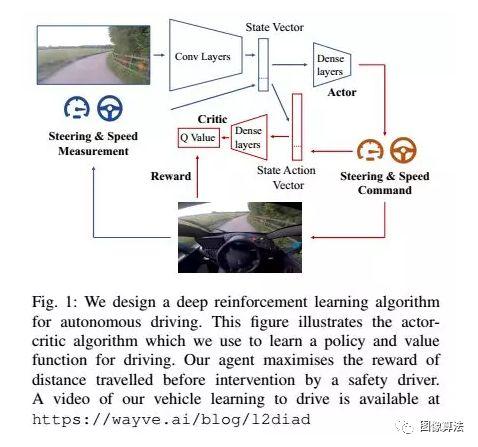
学会开车一天
关键词:基于人工智能的方法,机器人和自动化中的深度学习,运输的计算机视觉
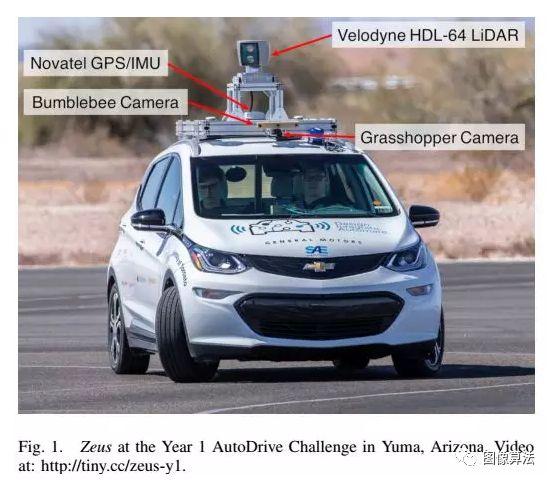
在六个月内建立一辆获胜的自动驾驶汽车
关键词:自主车辆导航,智能交通系统,交通计算机视觉
用于汽车转向预测的端到端网络中的多模态时空信息
关键词:自主车辆导航,机器人深度学习与自动化,视觉学习

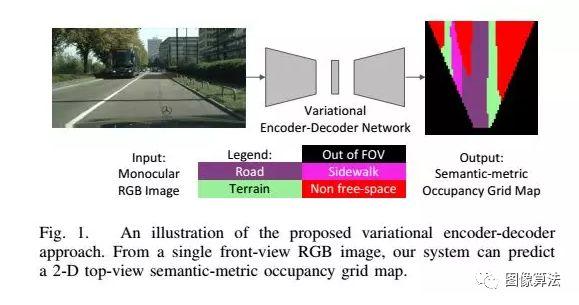
基于卷积变分编码器 - 解码器网络的单目语义占用网格映射 - IRAL
关键词:语义场景理解,目标检测,分割和分类,运输计算机视觉


















评论