在马里亚纳海沟驱动!浙大等团队软体机器鱼登《自然》封面
澎湃新闻记者 贺梨萍
4年前,当时30岁的浙江大学流体动力与机电系统国家重点实验室、工程力学系教授李铁风及其同事从蝠鲼(又称“魔鬼鱼”)中获得灵感,设计了当时全球游得最快的软体机器鱼。时隔4年,李铁风团队再次受超深渊中的狮子鱼启发,获得重大进展。

北京时间3月4日凌晨,顶级学术期刊《自然》(Nature)以封面文章的形式刊发了由浙江大学、中国科学院深海科学与工程研究所、国防科技大学、上海海洋大学、大连海事大学等团队联合完成的一项研究,题为“Self-powered soft robot in the Mariana Trench”。
研究团队设计了一款能进行深海勘探的自供能仿生软体智能机器鱼。在测试中,该机器鱼能在马里亚纳海沟10900米深处成功驱动,还能在南海3224米处自由游泳。
李铁风为论文的通讯作者。其主要研究方向为软物质力学,智能材料结构设计、软体机器人、水下智能装备、医疗康复装置等,提出通过控制力电失稳实现极大电致变形的驱动理论。在Sciennce Advances、Advanced Materials 等期刊上发表论文50余篇,论文引用2000余次。获国家自然科学基金优秀青年基金、中国科协青年人才托举工程、科学探索奖(前沿交叉领域)、麻省理工科技评论科技创新35人(MIT TR35-China)等荣誉。
海洋占地球表面的70%以上,但目前人类的探索仍局限在较浅的海洋深度,由于深海环境压强极高,在那里工作的机械系统一般需要刚性的身体和压力补偿系统,因此深海基本上仍是未知区域。
然而,生活在中等海洋深度(1000米左右)的软体生物,如章鱼和水母,它们没有庞大或厚重的耐压身体,却依然能够在海洋深处游刃有余。这些软体生物是软体机器人研究的最初灵感来源,并已被广泛研究,它们的深海中的适应性启发了水下软机器人的设计。
研究团队认为,优雅的软体机器人设计为深海探测提供了途径。他们在论文中提到,最近的研究表明,具有拍打、波动和喷射等推进模式的软体机器人表现出了优异的游泳性能,尽管它们的执行器很软,结构也很灵活,但这些机器人的动力和控制电子设备仍然需要庞大而坚硬的容器来保护它们免受极端压力。一种没有刚性容器、能够在极端深度的海洋中游泳弹性软体机器人,目前还没有开发出来。
李铁风等人将灵感目标锁定在超深渊带。在海洋学上,透光层以下的区域常被定义为深海,深度一般在200米以下。按照深度不同进一步将其划分为中层带、深层带、深渊带与超深渊带。狮子鱼就是超深渊“居民”,中国科学院深渊科考队就曾在马里亚纳海沟和雅浦海沟通过着陆器获取过7000多米海底的多个狮子鱼样本。
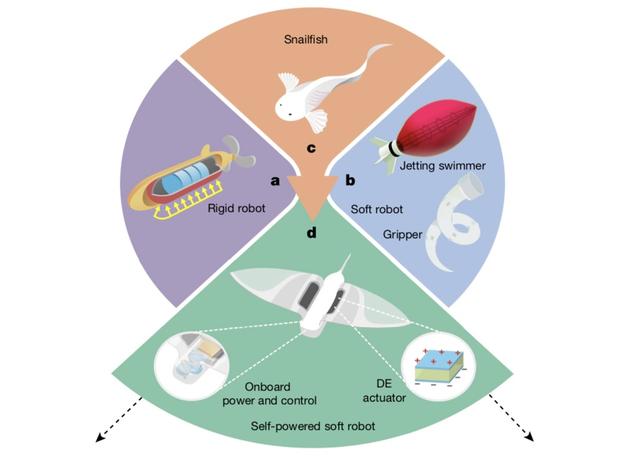
研究团队即受到超深渊狮子鱼身体构造的启发。论文中写道:这条鱼的身体特征包括分散式骨骼和摆动的胸鳍,这些特征指导了我们深海软体机器人的动力、控制和DE(介电弹性体)执行器的机械设计。
他们开发了一款能进行深海勘探的仿生软体机器鱼,整体有22厘米长(身长11.5厘米、尾长10.5厘米),翼展宽28厘米。该机器鱼被设计成一个鱼形的身体形状和两个拍动的侧鳍,拥有机载电源、操控力以及水下自推进的能力。机器鱼两翼与身体上的“肌肉”相连,它们由一种凝胶状软材料制成,可以将电能转化为机械功,当机器鱼电池的电流作用于肌肉时,肌肉就会舒张与收缩形变,由此带动两翼拍动驱动机器鱼。
在《自然》同步在线发表的观点文章中,新加坡国立大学的Cecilia Laschi写道,李铁风及其同事面临的挑战之一是找到一种方法来保护机器人的电子组件不受高压的影响。而研究团队正是从超深渊狮子鱼的骨骼中获得灵感,他们将电子器件分开排列,而不是像其他电子设备那样将它们集中在一起。研究还提到,从单个印制电路板(PCB)上分离所有组件在技术上是困难的,因为它们数量庞大,为此他们还增加了相邻电子器件之间的距离。
Laschi在上述观点文章中提到,实验室测试和模拟表明,这种排列降低了受压电子器件之间界面的应力。然后,这些分散的电子设备被嵌入到硅胶中,与机器鱼结合在一起。“这种方法比其他保护深海设备电子器件的方法更实用,也更便宜。”
00:57
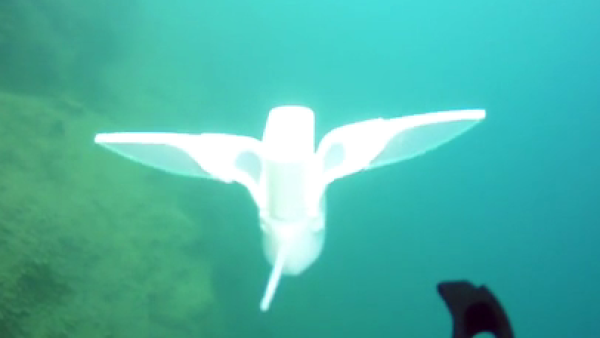
软体机器人在约70米深度湖中游泳,由“Blue Rov”水下无人机带入水中,分别在8米和70米处释放。(00:57)
李铁风等人首先在大量的模拟实验中验证了材料和结构的可行性。随后,机器鱼被“Blue Rov”水下无人机带入水中,在70米深的湖中进行了测试,在那里它以每秒3.16厘米的速度自由游动。
00:40
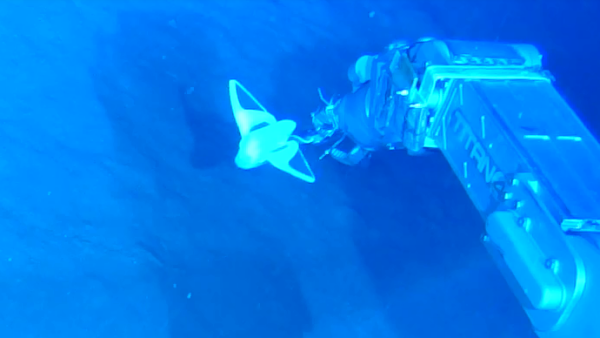
软体机器人在南海3224米深度下自由游泳。软体机器人由“海马”号深海遥控潜水器的机械臂带往海底。(00:40)
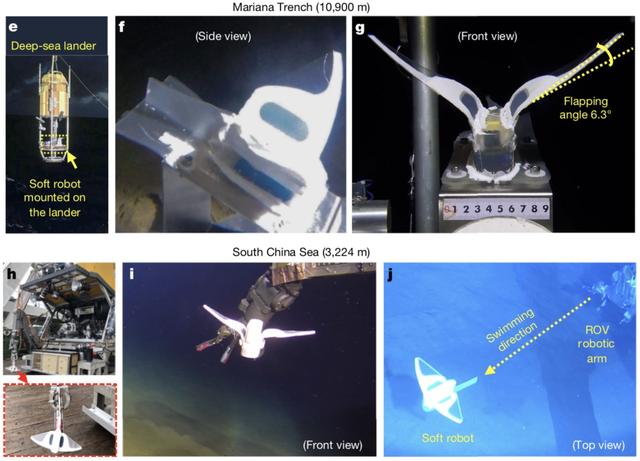
研究团队还使用“海马”号深海遥控潜水器的机械臂将软体机器鱼携带至南海约3224米深的地方进行了测试,它可以自如游泳,达到了每秒5.19 厘米的速度。
00:24
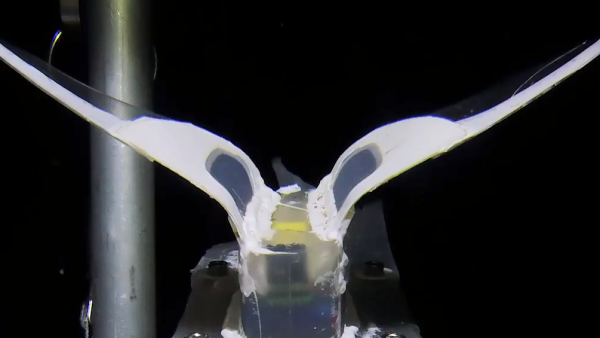
软体机器人在马里亚纳海沟10900米处扇动两翼,机器人由深海着陆器带至海沟底部。(00:24)
该软体机器鱼还由深海着陆器带至马里亚纳海沟,在10900米深处的一个现场试验处驱动成功。在测试中,研究团队没有将机器人从着陆器上释放,在没有压力容器的情况下,机器鱼在2500毫安锂电池的驱动下,保持拍打45分钟。
研究团队总结表示,未来的工作将专注于开发软体轻质的材料和结构,让用于极端条件下的装置具有更好的智能性、通用性、操纵性和效率。
Laschi在上述观点文章则提到,李铁风等人的研究获得了突破,嵌入软材料中的分布式电子元件取代了电子元件的刚性保护外壳,为开发新一代深海探险者铺平了道路。他同时提到,在这种设计的机器人进入海洋之前,还有更多的工作要做,这包括水下机器人的速度、承受较大扰动的能力,以及移动能力,这些都需要进一步优化以适应实际应用。
论文链接:https://www.nature.com/articles/s41586-020-03153-z
责任编辑:李跃群
校对:张艳



















