又软又轻更高效,还能无线通讯,NUS用新金属材料折出软体机器人

大数据文摘出品
来源:nus、MIT
编译:Stats熊、陈若朦
50年前,第一个工业机器人手臂Unimate成功安排了一次简单的早餐,它成功将烤面包、咖啡和香槟送达。它的动作看起来像是一个无缝的壮举,但其动作的每一个位置都是经过仔细考虑的。
尽管今天的机器人已经变得更加智能,且适应性更强,但运送轻小易碎物件这样的任务,对于双手僵硬的机器来说仍然很困难。机器人往往只在具有预定义形状和位置的结构化环境中工作,通常无法处理位置或形式的不确定性。
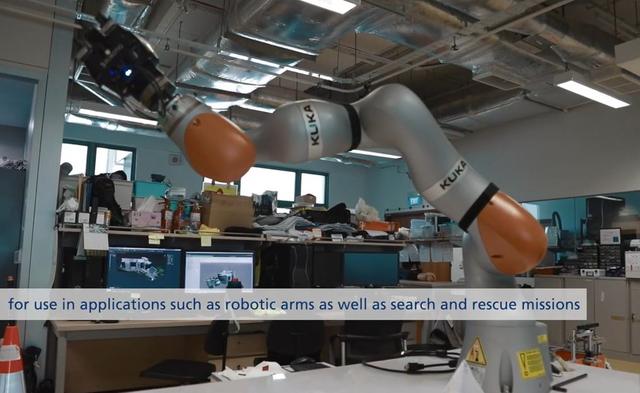
近年来,机器人专家已经开始专注于软体机器人的研发,使其具有足够的柔韧性能够捡起任何东西。目前最为先进灵活的机器人是“折纸机器人”(origami robots),它可用于人体的药物输送、灾难环境中的搜索和救援任务,以及用作人形机器手臂。
折纸机器人在柔韧性上的要求比较高,一般是用纸、塑料或者橡胶作为材料。为了让机器人更实用以完成特定的任务,通常是将传感器和其他电子元件加装在它们顶部,但这会让它们显得更占空间,变得更重,进而需要更多的动力来移动。
现在,新加坡国立大学(NUS)的一组研究人员开发了一种新方法,创造一种新的金属材料,采用“石墨烯氧化模板合成”的新工艺制造,成为了用于软机器人的新材料。
这种新型材料在保持传统纸张和塑料可折叠性和质量轻的基础上,由铂等金属与燃烧后的纸(灰)混合物为材料。事实上,这种材料只有纸一半的重量,但能够使机器人仍然具备扭转和折叠的能力,这也让它更具能效。而且它是导电的,机器人可以与操作员或其他机器人进行无线通信,而不需要额外的传感器。这种材料可能会推动世界各地对轻型“折纸”机器人的前沿研究。
成功实现应变传感和无限通讯
折出一只金属软体机器人
来自NUS工程学院化学与生物分子工程系的助理教授Po-yen Chen是这个项目的负责人。他在2017年提出了这种材料的想法,并与团队的其他10名成员一起开发了生产这种金属材料的工艺。
研究人员通过一种名为“石墨烯氧化模板合成”的新工艺来制造这种金属材料。他们首先将纤维素纸浸泡在氧化石墨烯溶液中,然后将其浸入含铂等金属离子的溶液中。之后将其置于800摄氏度(1472华氏度)的惰性氩气中燃烧,再于500摄氏度(932华氏度)的空气中燃烧。最后将材料浸入高弹性溶液中使其稳定。
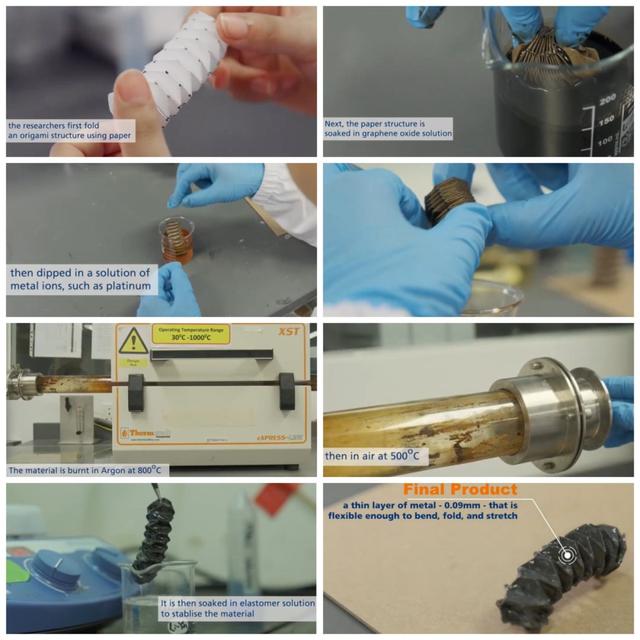
“石墨烯氧化模板合成”制备工艺
最终的产品是一层薄薄的0.09 mm金属——由 70%的铂和30%的非晶碳(灰)构成足够灵活弯曲,折叠和拉伸。其他金属如金和银也可以被使用。
相关研究论文《Multifunctional metallic backbones for origami robotics with strain sensing and wireless communication capabilities》发表于《Science Robtics》期刊上。
论文链接:
https://robotics.sciencemag.org/content/4/33/eaax7020/tab-pdf
研究小组组长Chen Po-Yen用一个切成凤凰形状的纤维素模板进行研究。“我们的研究也受到神秘生物的启发,就像浴火重生的凤凰,每一次在烈火和灰烬中获得新生就会获得更强大的力量。”
用作能导电的骨干,实现机器人无线通信
在机器人的设计上,电力必须来自更大、更重的电池,这就形成了一个不断增加重量和电力需求的恶性循环。陈教授说:“这就是为什么像我们这样的研究人员总是希望通过制造更轻的机器人来打破这一循环,从而降低能耗和使用更小的能源。”
该团队的研发的折纸结构是一种稳定的薄弹性体,可进行重新配置。这种材料可以作为机械稳定、柔软和导电的脊骨,使机器人具备应变感知和通信能力,而不需要外部电子设备。
导电意味着这种材料充当自己的无线天线,这让它可以不通过外部通讯模块,与远程操作员或其他机器人通。这扩大了折纸机器人的工作范围,例如在高风险环境中工作(如化学品泄漏和火灾)、作为远程控制的不受束缚的机器人、或作为人造肌肉或类人机器人手臂。
Po-yen Chen和Yang Haitao
NUS化学与生物分子工程博士生Yang Haitao是这项研究论文的第一作者,他说:“我们用不同的导电材料进行实验,最终得出了一种独特的组合,从而实现了最佳的应变感知和无线通信能力。因此,我们的发明扩展了用于制造先进机器人的非常规材料库。”
该研究团队还在试验其他如铜等其他金属,来降低材料的生产成本,使其对商业应用更具吸引力。团队也正在寻求为金属骨架增加更多的功能——一个值得被研究的方向是将电化学活性材料加入到储能设备中,这样材料本身就是它自己的电池,由此实现自供电的机器人。
来一只又软、又轻、又大力的假肢!
将驱动、传感和通信能力紧密集成到折纸机器人中,使得新一代功能机器人的发展成为可能。然而用于构建折纸机器人的传统材料(如纸张和塑料)却缺乏整合、附加功能的设计能力,而且安装外部电子设备需要很高的系统集成度,不可避免地会增加机器人的重量。
石墨烯氧化物模板合成技术的开发,实现了复杂贵金属折纸(如Pt)的生产,具有更好的变形性、阻燃性和节能性,可被用于制造可重构、顺应性强、多功能的金属骨架。
使用这种新型金属材料制成的轻质金属骨架,至少比传统材料轻三倍。相同时间内,这种新材料机器人工作速度更快,而且耗能只有原来的70%,变得更为高效。这种新材料还具有防火性能,适用于在恶劣环境下工作的机器人。这种新材料可以在800摄氏度(1472华氏度)的高温下燃烧5分钟。

材料实验测试结果
此外,这种导电材料具有地热加热的能力——通过这种材料发送电压使其升温,这有助于防止机器人在寒冷环境中工作时的冰损伤。这些特性有助于创造轻便灵活的搜救机器人,让它们进入危险区域,并实时反馈与通信。
这些特性使得这种新材料成为制造柔性、轻便假肢的不二选择,同时,这种假肢比传统假肢轻60%。这种假肢可以提供实时的应变感知,反馈弯曲的程度,给使用者更好的控制和即时的信息——所有这些都不需要外部传感器,否则会给假肢增加不必要的重量。
今年3月,哈佛大学(Harvard)和麻省理工学院(Massachusetts Institute of Technology)的研究人员开发出了一种机器人肢体,它可以用一个柔软的折纸手抓取各种物体,包括酒杯和水果。传统的机械手臂用僵硬的手指会损坏这些物体。
该肢体夹持器由三部分组成:以折纸为基础的骨架结构、密封的外壳和连接器。该团队使用机械橡胶模具和一种特殊的热收缩塑料——这种塑料可以在高温下自动折叠。
夹持器可以抓住并举起其直径70%的物体,这使得夹持器能够拿起并握住各种软性食物而不会造成伤害。它还可以捡起超过4磅重的瓶子。同时考虑软体机器人的柔韧性以及足够的力量是非常困难的。
但是夹持器的形状使它更难以抓住一些平面的东西,如三明治或一本书。这只机器人肢体的创造者之一Daniela Rus说道:“我的梦想是创造一个能够自动为你打包食品杂货的机器人。”

机器肢体可以拿起精巧的小物件,也能拿起自身重量100倍的大件


















评论