圆水下机器人的“芭蕾”梦
大家好,我是一名水下机器人“萌新”,我来自中国科学院沈阳自动化研究所,我有很多有名的哥哥姐姐,像是“海斗一号”、“潜龙一号”、“小黄鱼”等,他们的身影在各大媒体频繁出镜,让我心生Respect!

(图片来自网络)
作为萌新,我在大佬们面前就是空气,但我志(ying)不(gang)在(bu)此(guo)。他们体态庞大,功能复杂,但在水下不够灵活。我的志向在于能像芭蕾舞演员一样,有着窈窕的身姿,可以在水下翩翩起舞。

(图片来自网络)
于是乎,在中国科学院沈阳自动化研究所海洋信息技术装备中心的研究团队帮助下,我的“芭蕾梦”有了希望。
研究团队发现,制约水下机器人机动性有两个方面。第一个是水下机器人为了潜入水下,都要带个“大肚腩”,也就是浮力调节系统,而且工作深度越大,“肚腩”就越大。第二个是水下机器人的“小短腿”,也就是螺旋桨等水下推进器。现有水下机器人为了搭载更多载荷,多采用效率较高的螺旋桨推进器、泵喷推进器、轮缘推进器等,但是这些推进器在提高水下机器人机动性,尤其是高速下的机动性方面表现一般。
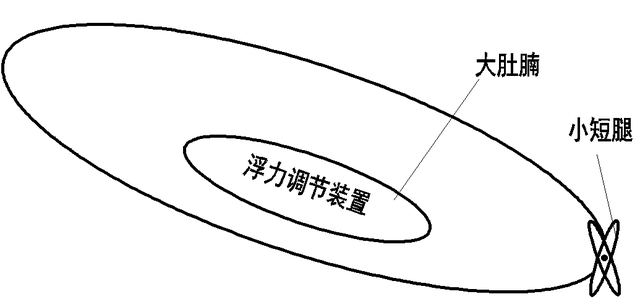
传统水下机器人的“大肚腩”和“小短腿”
为了解决上述问题,研究团队借鉴空用扇翼推进器,在学界首次提出了“水下扇翼推进器”的概念,并成功将其用于水下机器人,为水下机器人装上“大长腿”,部分替代了浮力调节装置,提高了水下机器人的机动性。
水下扇翼推进器可以定义为:“工作在水介质环境中,在固定机翼中嵌入可主动旋转的横流风扇的推进器。”通过横流风扇的旋转,该推进器可以产生显著的前向力和垂向力。利用前向力推动机器人前进,利用向下的垂向力推动机器人潜入水下,进而替代浮力调节装置。
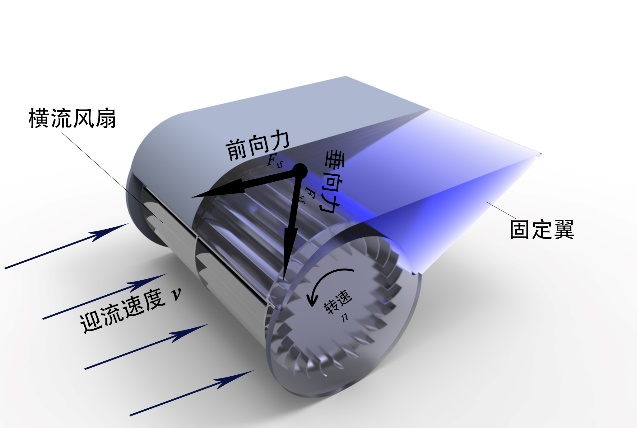
水下扇翼推进器构型
基于水下扇翼推进器,研究人员研制了水下扇翼航行器(也就是我),小短腿改成了两个“大长腿”,可以实现前进、下潜、变向、俯仰、横摇等5自由度的运动,还成功减掉了“浮力调节”这个大肚腩。

水下扇翼航行器(忘记开美颜了/害羞/)
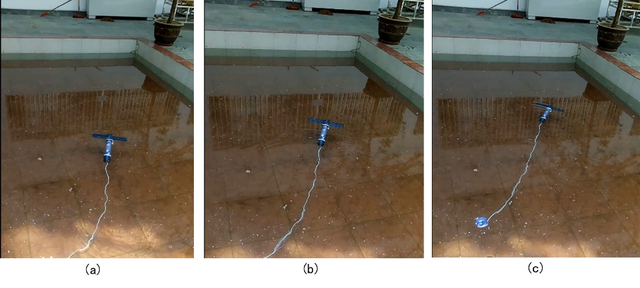
直线航行
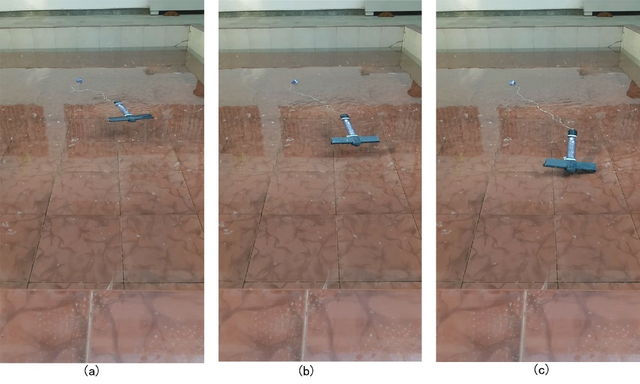
下沉航行

转弯航行
研究人员还对水下扇翼推进器的动力学特性等展开了深入研究,相关研究成果多次发表于国际学术期刊Ocean Engineering。
首先,研究人员选取了典型的水下扇翼推进器截面,对不同横流风扇转速、航速下的水下扇翼推进器展开仿真和实验研究。
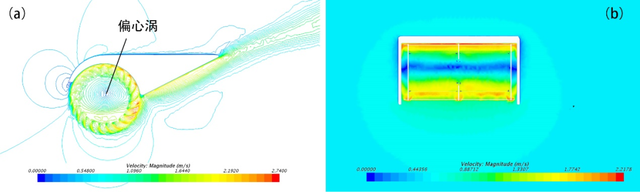
计算流体力学仿真(类似于“手绘X光照片”)
研究结果表明,水下扇翼推进器具有如下一般性特性:
随着转速的增大,推进器前向力、垂向力、转矩和功率不断增大。
随着航速的增大,前向力先增大后减小,垂向力增大,转矩和功率不断增大。
除了一般性规律,水下扇翼推进器具有如下典型特征:
在低航速、高转速的工况下,前向力和垂向力的波动增大,转矩增大,所消耗的功率提高。
航速越高,功率和转矩越大。
存在最大效率点,且在最大效率点航速附近前向力取得最大值。
接着,研究人员选取了前开角、后开角、机翼上平面长度和迎流角等四个典型参数对水下扇翼推进器的固定机翼对于其水动力学特性的影响展开了研究。
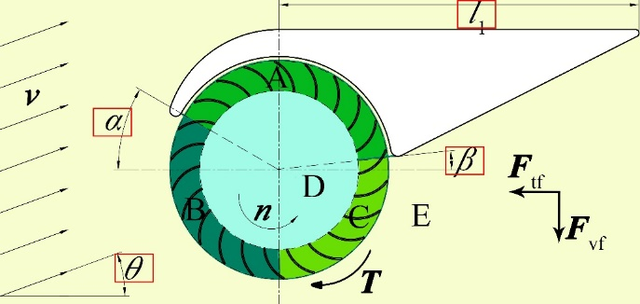
固定机翼的四个典型参数
研究结果表明:固定机翼可以控制流入和流出横流风扇流量和方向,也会影响到一些特殊流体现象的形成,如偏心涡的位置和大小,驻留涡、尾涡以及机翼上表面的边界层分离等。
近期,研究人员还研究了横流风扇内外径比、叶片数量、叶片内角和叶片外角等参数对于水下扇翼推进器的水动力学和水声学特性的影响。
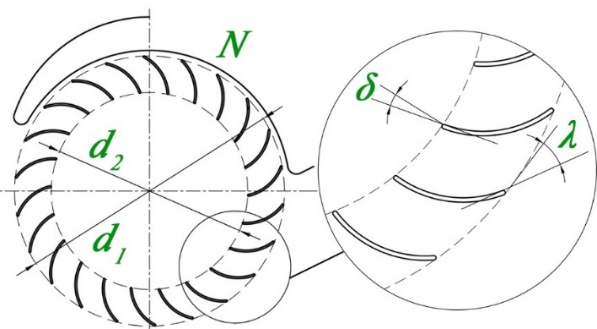
横流风扇几何参数的选取
研究结果表明:横流风扇叶片内角和叶片外角对流体的流入和流出横流风扇起到主要作用,其做功充分与否主要受横流风扇内外径比的影响,叶片数量是对水下扇翼推进器水声学特性影响最大的因素。
水下扇翼推进器的研究,得到了中国科学院战略高技术创新基金、国家留学基金委、新加坡学术研究基金、机器人学国家重点实验室等的大力支持。
未来,研究人员将对水下扇翼推进器展开更加深入的研究工作,包括水下扇翼推进器的理论机理,模块化、实用化的水下扇翼推进器开发,帮助更多的水下机器人实现“芭蕾”梦。
来源:中国科学院沈阳自动化研究所



















评论