新加坡科学家研发植物机器人,可用于观测植物健康和病虫害预警
植物也能“联网”?新加坡南洋理工大学华人教授陈晓东做到了。
图 | 用手机控制捕蝇草机器人
近期,其团队开发了手机可控的植物机器人,用以展示该植物机器人的快速响应性和对传统 CMOS 电子的兼容性。
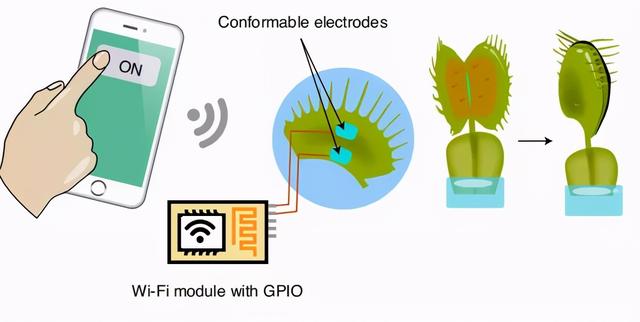
图 | 用手机控制捕蝇草机器人
如上图,用手机 App 给出命令,并发送给 Wi-Fi 模块,共形电极即可收到 3.3V 的激励方波,进而启动捕蝇草机器人,这证明了植物也可以联网。
说起机器人,当下最“网红”的莫过于波士顿机器狗,它会捡垃圾、会搬砖,但其毕竟是纯机械机器人,因此目前主要干些粗活,尚无捡起线头等微小物体的能力。事实上,机器人不仅有庞然大物型,也有袖珍小巧型。
如下图,这正是会穿针引线做“绣花活”的捕蝇草机器人,并且它是一款半植物机器人。
图 | 正在捡起铂金属丝的捕蝇草机器人
该机器人由捕蝇草和柔性共形电极组成,其诞生于陈晓东的实验室,不仅能捡起直径 0.5 mm 的铂金属丝,还能抓住一枚重 1g 的砝码。
图 | 抓住砝码的捕蝇草机器人
1 月 25 日,相关论文以 《使用共形电极构建的植物基按需致动器》(An on-demand plant-based actuator created using conformable electrodes)为题发表在《自然 - 电子学》上。
本次研发的捕蝇草机器人,是一个以捕蝇草叶片为驱动单元、共形电极为调制单元的电动植物基致动器。其中,共形电极用于调节捕蝇草的电生理功能,可使其按需要开合叶片。
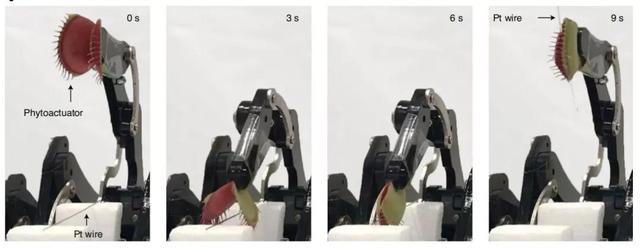
图 | 可捡起直径 0.5 mm 铂金属丝的捕蝇草机器人
捕蝇草,是一种草本植物,叶子边缘带有毛刺,人们觉得这很像古罗马神话中爱神维纳斯的睫毛,因此给它起名 Venus Flytrap,意为 “维纳斯的捕蝇陷阱”,它是东南亚的一种常见植物,“个性” 和含羞草有些类似,用手碰它叶子就会合起来。

图 | 正在捕食苍蝇的捕蝇草(来源:Pixabay)
那么,为何本次研究选中了捕蝇草?这要从一次基于想象的尝试开始。
植物和人一样会传达信号
陈晓东表示,人类通过神经电信号来传导信息,比如遇到刺激时,电信号迅速传递,使人做出应激反应;而植物遇到刺激时,也会出现电信号变化。以捕蝇草为例,昆虫轻触捕蝇草内表面时,它会产生电信号,电信号继而控制捕蝇草叶片闭合,捕获昆虫。
捕蝇草为在自然界生存,已经进化成一个小型机器人,只是它的触发方式是“触碰”。想要更好地为人所用,就得使用电气接口。
一开始,他们并不知道捕蝇草可以被电激励干预。做出这种尝试的基础是,捕蝇草叶子的开合,是由于内部产生了电信号。故此他们推测,如果人为触发电信号,有可能干预植物的电生理行为。
然而,要想接触植物“皮肤”并非一件易事,人类皮肤非常容易被水打湿,而植物表面存在一层疏水的蜡状角质层,比如荷叶表面很难被水湿润,水滴只能在上面滚来滚去,捕蝇草的疏水性未必像荷叶那样强烈,但表面也很难被水滴湿润,这会导致叶子表面难以附着电极。
在此情况下,要想用电来干预植物,就需要创建物理接口。因此,该团队的首要任务是研发适用于植物的电极器件,这种电极既能检测植物发出的电信号,还得能向植物传递电激励。
理想情况下,电极应该是非侵入性的,并且还要足够贴合,只有顺应植物的运动形态,才能实现良好的导电效果。
为此,陈晓东团队制备出柔性共形电极,该电极由粘性水凝胶作为植物接触层和离子导电层。接触层具有良好的生物兼容性和透光性,在传导离子信号的同时,不会影响植物本身的生理状态。
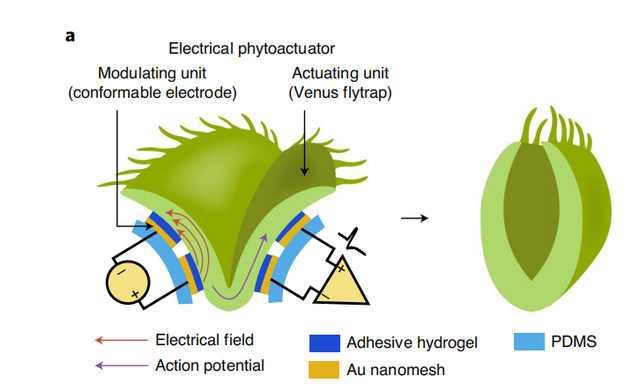
图 | 电气植物致动器
在电子传导层,陈晓东团队使用化学合成的金纳米网膜,该金纳米网能被转移到一种可拉伸的有机硅物料 PDMS 上(Polydimethylsiloxane,聚二甲基矽氧烷)。
由于“金纳米网–PDMS” 薄膜足够透明,可保证捕蝇草有效地吸收光照。该薄膜还具有较高的可拉伸性,即使在 135% 的应变下仍然具有导电性。此外,共形电极总重约 4.9 mg,比重量约 228mg 的捕蝇草轻得多,连接到捕蝇草后的重量可忽略不计。
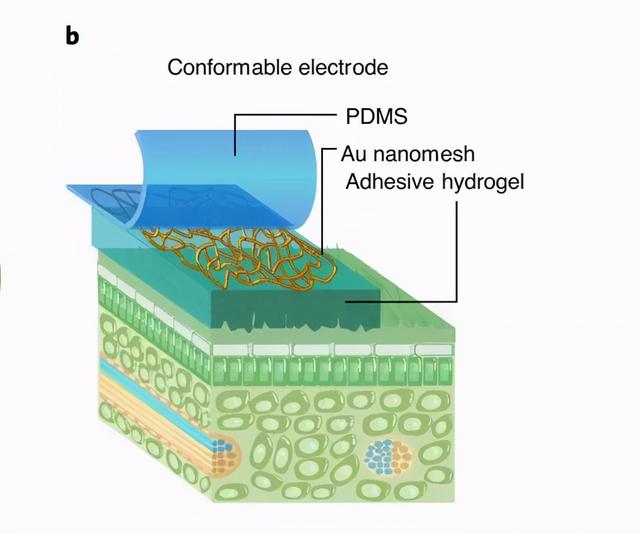
图 | 附着在叶片表面的共形电极的示意图
以上数据,说明该团队的共形电极兼具导电性、透明性、重量轻、以及和植物的适形性,最终形成的生物相容性电界面,可牢固附着捕蝇草,所以电信号的连续测量、和电激励的传递可得到保障。
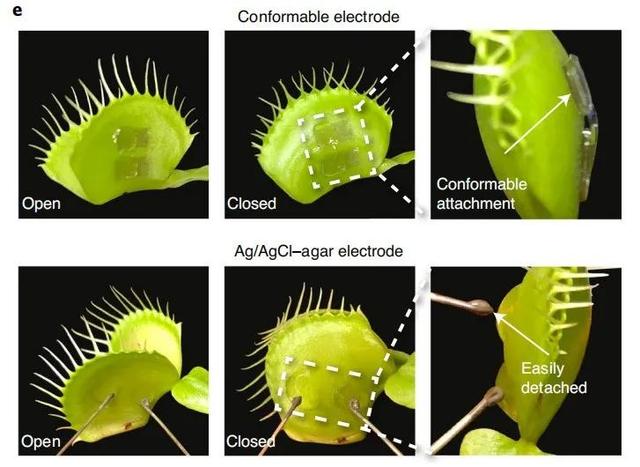
图 | 和捕蝇草兼容的共形电极
捕蝇器的电调制
在机械激励实验中,该团队证实捕蝇草每次被触碰,都会产生一个动作电位(AP,Action Potential),并且需要两个连续动作电位,才能闭合捕蝇草叶片。
但是,两次接触的时间间隔不能超过 60 秒,超过 60 秒则无法闭合。这说明,捕蝇草通过电信号来传递触碰信息,并且具有记忆功能:它会记住第一个动作电位,并在第二个动作电位出现后关闭叶片。
在电干预实验中,该团队给捕蝇草叶片连上两对共形电极,一对电极用于激励,另一对用于获取电位信号。
电位信号和电流密度的测量证明,在 3V 直流电激励下,捕蝇草也会产生动作电位,并且会在第二个动作电位产生时闭合叶片。他们借此发现,电刺激导致的捕蝇草闭合,和机械刺激导致的闭合相似。
最终,该团队发现捕蝇草机器人在工作时,最低仅需 1.5 V 的电压,功耗仅为 10 µW,比传统电激励方法小四五个数量级。整个响应时间仅为 1.3s,比多数软电动促动器都快,这受益于捕蝇草自身的开合能力、以及和共形电极的强强联合;它的功耗也很低,这是因为运动本身由捕蝇草完成,电能只起到刺激作用。

图 | 电压下的捕蝇草
概括来说,上述研究提供出一种基于植物等自然资源、去开发致动器装置的现成策略。对陈晓东来说,他的任务是找到与自然界中各种智能系统接口和调节的方法。
最难以攻克的地方:界面和控制
谈及研究中最难攻克的地方,陈晓东只说了五个字:界面和控制。如何实现与植物的接口与通信,以达到控制植物的目的,是最难的地方。
该研究耗时 3 年时间,从制备植物共形电极,到后续反复进行植物测量与控制实验,再到集成植物机器人,陈晓东集中多人力量才完成了人工器件和自然界生物的结合。这对于未来设计软体机器人,也有一定借鉴意义。
相比来说,波士顿机器狗等传统机器人,擅长在结构良好、定义明确的环境中,执行搬砖等重复性任务。但在不断变化的环境中,它们在处理未定义对象时,效率相对较低,例如其粗大的机械手,很难抓起细小物体。
此外,该团队还发现了捕蝇草机器人的模块化特性。也就是说,把捕蝇草从茎上剪下,再进行防脱水封装,捕蝇草机器人依然能正常工作。这意味着该植物机器人可以脱离花盆或支茎,被安装在各种电气平台上,真正实现植物与电子的互联互通。
谈及未来,陈晓东表示他希望开创植物电子学,他说这是一种交叉学科。因此其实验室成员的背景很丰富,如材料、化学、电子工程、人工智能和医学背景等。
植物电子学涉及到很多电子器件,比如如何用尽可能低的功耗,以无损伤的方式观测植物行为。这种电子器件,必须是柔性的、且以贴附方式对植物做长时间监控。这些工具的发展,是为了获悉植物的生长过程。长期来看,可在智慧农业方面提供精准的工具,用于观测植物健康和病虫害预警。
以陈晓东所在的新加坡为例,这个东南亚小国一直在追求用有限的土地,产出更具附加值的产品。该国已经设定食品愿景,希望在 2030 年实现本地出产的农产品可以满足国人三成的营养需求目标,降低对进口食品的依赖。而植物电子学的发展,必能助力该计划。




















