“辛伯林”雷达为何能定位迫击炮?中越冲突时的真实战绩如何?
(转载请注明出处)
"辛伯林"(Cymbeline)迫击炮定位雷达以及它在80年代中越边界武装冲突中的经历在中国军迷当中已经传得脍炙人口了。网上诸如 "我军反炮兵雷达如何8秒锁定敌位置?曾让越军不敢开一炮"之类耸人听闻的帖子满天飞,其中有不少荒诞内容,光是产地就一会说是英国一会说是瑞典的。今天就来介绍一下这种雷达的构造、原理。

前线的“辛伯林”,右图下方的操作手正在操作显示器和坐标指示器
首先要澄清的一点就是,“辛伯林”雷达是英国货,为桑恩电子(Thorn-EMI)公司研制的产品,和瑞典八竿子打不着。另外,“辛伯林”雷达的反应时间也略长于8秒。
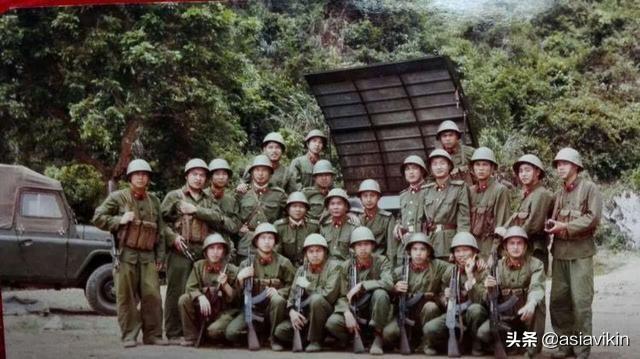
志愿军迫击炮组
英国是老牌军事强国,在二战中就已经吃足了敌方迫击炮的苦头。在五年后的朝鲜半岛,面对从中朝军队阵地上雨点样飞来的迫击炮弹还是照样一筹莫展,这让英国陆军部王八吃秤砣——铁了心。1953年朝鲜战争还硝烟未尽,陆军部就颁布了相关规定要野战炮兵雷达解决迫击炮定位问题。1956年与桑恩公司签订了研制合同,1962年专用的迫击炮定位雷达FA NO.8 MK1"绿衣箭手"问世。该雷达首次引入了模拟式计算机解算敌方炮位,从探测到首发迫击炮弹回波到显示出炮位的反应时间一般是20秒。但"绿衣箭手"太笨重了,整个系统重达7000磅,要两辆载重三吨的卡车伺候。由于二战后局部战争成为主要战争形式,轻便灵活的迫击炮在局部战争中大放异彩;相应的反迫击炮手段也必须机动灵活才能跟得上对手的节奏,这就引出了"绿衣箭手"的继承人——"辛伯林"雷达。
结构与组成
"辛伯林"雷达是桑恩公司对"绿衣箭手"彻底轻型化后的产物,含电源在内仅重390公斤,工作在X波段。包括雷达、电源、拖车三部分。有MK1、MK2、MK3三种型号,MK1、MK2采用福斯特扫描器,MK3使用相控阵天线。这里介绍的是MK1、MK2。
雷达
包括底座、雷达头、遥控和指示器装置。

雷达、显示器、拖车
底座通过四个千斤顶置于地面或拖车上。底座上带有方位传动部件,方位环和导出方位座标的方位组合。
雷达头包括发射机/接收机系统、计算机、发电机组及机架。机架内有气冷装置,反面有枢轴,天线绕枢轴在俯仰上可动。天线由反射器、福斯特扫描器和导出俯仰数据的仰角分解器组成。
雷达内部广泛采用集成电路等固态器件,封装密度高,仅需作少量的预调。真空管部件仅有磁控管、闸流管和阴极射线管。
阴极射线管显示器和坐标指示器可迅速拆卸,安置到离主机15米远的安全位置上进行遥控,主机与显示器之间用电缆连接。显示器操作手直接在荧光屏上做记号。显示器白天也能工作,且能消除由视差引起的测绘误差。第二操作手从指示器的数字计数器上读出目标坐标,经无线或有线网传输信息。
电源
电源包括转子发动机,带动400赫兹交流发电机,整流后以28伏直流输出1.5千瓦功率。电源的燃料箱装有足够八小时运转的燃料。在设计上尽量减少噪声,以确保操作安静。
拖车
拖车为两轮轻型拖车,载重一吨,钢制机架。机架上有制动器、夹紧装置及照明系统。制动器是滑轨液压式的,夹紧装置则由杠杆控制以保持雷达在拖车上的平稳。另有四个支柱供雷达工作时使用。机架高度可调,可降至0.23米,便于装入飞机。
工作原理及部分参数
"辛伯林"雷达能够定位迫击炮的关键在于其独特的福斯特扫描器以及定位的外推算法。
福斯特扫描器
福斯特扫描器是一种不常见的天线系统,可以实现波束的快速扫描。1943年由加拿大麦吉尔大学的J.S.福斯特提出。他提议在线源和输出孔径之间放上一种可变路径长度的器件以实现扫描。扫描器的基本形式由两个同轴锥体组成,每个锥体配备一个壁垒装置把电磁波约束在所需路径中。内锥体的简单旋转运动就在孔径输出端产生单向的线性扫描。由于结构简单,福斯特扫描器不仅应用于"绿衣箭手"雷达,还被美军1957年装备的AN/MPQ-4迫击炮定位雷达采用,1967年日本东芝据此仿制的JAN/MPQ-N1定位雷达也使用了福斯特扫描器。
三重锥体福斯特扫描器侧视图
"辛伯林"雷达使用的是三重锥体福斯特扫描器,内外有三层锥体,中间的锥体是旋转的,内外的两层锥体为固定的。锥体间距仅为10毫米,每个锥体沿母线方向开有一条馈电缝口,缝口的一边装有梳齿。三个锥体都采用铝蜂窝夹层板结构以尽可能减轻结构重量。在内锥体里有馈电喇叭和一条带反射镜,反射镜为0.5毫米厚,10毫米宽的铜板制作,为一空间曲面,该曲面与内锥体展开平面的交线为抛物线。扫描器的原理并不复杂,但对加工精度的要求很高,在后来国内组织仿制“辛伯林”雷达的时候,对福斯特扫描器的分析和制作成为关键。
扫描器工作时,内外锥体固定不动。中间的旋转锥体在驱动装置带动下,以每分钟约1000转的速度转动。来自内锥体馈电喇叭的电磁波,经反射镜反射到内锥体缝口,经梳齿将电磁波反射到内锥与转锥之间的内锥腔中.再经转锥体缝口上的梳齿把电磁波传输到转锥与外锥之间的外锥腔中.之后再输出到外部天线的馈电喇叭上。这样就在空间上形成了一道来回扫描的倾斜波束,扫描范围是40度的扇面。"辛伯林"雷达可以在空间上形成两个扫描扇面定位弹丸,扫描扇面下方有一预警波束提示有弹丸出现。
外推算法
如前所述"辛伯林"雷达有两个扫描扇面,这样对每发飞行弹丸可以截获两个点,并测出每个截获点的斜距、方位角、仰角以及两点间的飞行时间。计算机根据这些信息算出迫击炮的位置。
“辛伯林”雷达的迫击炮位外推示意图
“辛伯林”雷达作战示意图
由于迫击炮弹的飞行速度慢,一般为亚音速,并且弹道弯曲,所以"辛伯林"雷达以两个扇面就可以获得足够精度的参数外推出发射位置。但是对于榴弹炮、加榴炮、加农炮就没这么简单了。因为这类身管火炮弹丸的飞行速度快,均为超音速,且弹道低伸,"辛伯林"获取的参数精度低,反推出的炮位误差大,不具有实际意义。国内曾进行用"辛伯林"的外推算法进行计算机模拟,对于82迫炮位的定位精度在25-40米范围,对122榴的定位精度则只有65-100米。所以,"辛伯林"并不适合定位远程火炮。而对付这类目标,就需要更高的数据采集率和处理速度,这就是相控阵雷达了。因此,在中越边境武装冲突中,对付越军的远程火炮,"辛伯林"是无能为力的。而后来从美国引进的AN/TPQ37无源相控阵火炮定位雷达才有这种能力,不过当时中越之间的冲突规模已经明显降级,该雷达并未上过战场。由于"辛伯林"的使用效果不错,国内在90年代组织了黄河机器厂专门仿制,后来成功国产化的"辛伯林"国内型号为371雷达。

美制AN/TPQ-37无源相控阵火炮定位雷达

国产化的371雷达
部分参数
工作波段:X
最大探测距离: 20 千米 (MK1,MK2),
最大定位距离:对60迫6千米,对82迫12千米,对120迫16千米。
最小探测距离:500米
反应时间: 15-20 秒
对天气要求:降雨量少于10毫米/小时
定位精度: 40 米 ( 侦察迫击炮 )、60 米 ( 校射炸点 )
天线
类型: 三层锥体 " 福斯特 " 扫描器 (MK1 、 MK2)
方位转速: 11.25 度 / 秒
方位扇扫范围: 40.5 度 (MK1 、 MK2);
单波束仰角: 1.41 度、2.5 度、3.7 度
预警波束间隔: 2.25度
双波束间隔 : 5度
峰值功率: 100 千瓦( 额定 ),脉冲重复频率4000hz
"辛伯林"在中国
根据目前的信息,"辛伯林"雷达可能是在70年代末80年代初从英国引进的。引进的数量有说三部,也有说四部的。无论是哪种说法,共同点都是一部配备宣化炮校作为教学之用,一部配备广州军区炮兵仪器侦察营,一部配备昆明军区炮兵仪器侦察营。

这部可能就是宣化炮校的“辛伯林”雷达
根据长年研究中越战争的蔡朋岑先生考证,在网上传得最多的那次越军特工破袭"辛伯林"雷达事件发生在1984年越军7.12老山大反扑前夕的7月6日凌晨,越军821特工团406营7连一个排潜入我老山防区白石岩地区,利用我军警戒人员懈怠之机,于2点30分同时破袭了昆明军区炮兵仪器侦察营"辛伯林"雷达阵地、边防17团160迫击炮阵地和122团9连3排等三处阵地。以亡1人,负伤10人的代价造成我军亡9人、负伤40人,损坏雷达一部、160迫击炮一门,报废汽车两辆。此次破袭干脆利索,堪称越军特工对华作战的经典战例。
关于"辛伯林"雷达的使用效果,这里引用原广州军区炮兵仪器侦察营雷达连一排王刚先生的记录,包括1981年法卡山、1985年及1986年两次靠矛山战斗。
向老英雄们致敬,网图侵删
1981年收复法卡山战斗
我一排5月16日接上级命令,5月18日从花县九塘出发,经阳江、湛江、钦州等地,于5月22日到达广西宁明县板旺地区,22日进入雷达阵地(448无名高地),23日下午开机工作,24日发现首个敌炮阵地发射的目标。7月19日撤出阵地。收复法卡山具体战绩是:开机548小时,侦察敌炮位11个,侦察坐标613个,上报125个,我炮兵利用70个,校射目标50个,坐标447个。雷达耗油375公升、机油4公升。辛柏林雷达发挥优势,使越军炮兵吃尽了苦头被我炮兵压制不敢还击,为收复法卡山战斗的胜利立下了汗马功劳,荣立集体二等战功,营部参谋姜汉荣,李彦勇技师荣立个人二等战功,一班长吴亦佳火线加入中国共产党,一排被广西边防三师授予"高超的技艺,火炮的神眼"锦旗一面。
1985年靠矛山战斗
1985年1月2日,我雷达连奉命在连长徐晓峰,指导员商希伦,副连长孙泽高、叶家进一排长陈栋、二排长黄文龙带领下,从广州花县出发经郴州,衡阳,桂林,南宁,崇左到龙州下冻春秀水库,利用夜色,当晚占领了320高地,再次参加广西边境炮击靠矛山战斗,1月15日开始炮击上午九时开机,整个上午万炮齐鸣,地动山河,不知道有多少炮弹向靠茅山方向打去,越军也不示弱,顽强反击,我们阵地周边落了很多炮弹,军区炮兵司令部李彦勇参谋代表前敌指挥亲自来我们阵地指挥,捕捉越军炮阵地坐标200多个,利用有效坐标打击越军,很快就把越军的炮火压制下去,无还手之力,辛柏林雷达发挥了绝对作用。
1986年靠矛山战斗
1986年元月15日,雷达连再次奉命参加战斗,在连长徐晓峰,指导员商希伦带领下,从广东英德河头出发经郴州、冷水滩、柳州、黎塘、南宁,宁明到龙州下冻春秀水库占领阵地,这次参加对越炮击靠茅山战斗中捕捉到越军炮阵地坐标127个,我军炮兵利用我雷达连提供的越军炮阵地坐标给越军沉重的打击,摧毁越军炮阵地三个,据点无数,当天前敌指挥部全战区通报表扬。
“辛伯林”雷达的使用国家包括:喀麦隆、中国、丹麦、埃及、芬兰、法国、印度、伊拉克、科威特、摩洛哥、新西兰、尼日利亚、挪威、阿曼、沙特阿拉伯、新加坡、南非、瑞士、英国。由这个长长的名单也可以看出,由于轻便灵活,对迫击炮的定位效果较好,“辛伯林”雷达在国际上很受欢迎。这应该也是当初中方选择引进该雷达的重要原因。




















评论