多无人机协同编队飞行控制与仿真系统对教学研究的意义
近年来,无人机具有低成本、无人员伤亡、设备简单、操作方便和灵活可靠等特点被广泛应用。其可以近距离对地面目标有选择性和针对性地实施观测,并且可以进入敌方阵地进行监视,提高情报的可靠性和时效性。在军事侦察和民用测量上采用一定的编队队形进行飞行,可以扩大侦察和搜索的范围。多架无人机编队飞行协同侦察时,通过调整相机在无人机上的安装角度,可对目标的全方位立体拍照,实现地面目标的侦察和监视。
单架无人机采用先进控制策略可实现实时的高精度姿态控制,完成轨迹追踪,但是多无人机编队飞行执行任务的成功率和抗突发事件的能力要比单架飞机飞行高。例如,在某次任务的执行过程中,有一架飞机出现故障不能继续工作,那么它可以返回进行维修,而其余飞机仍旧按照原来的计划保持编队飞行,使任务得以圆满完成。但是现有的科技水平还无法支持完全意义上的多无人机编队自主决策功能,几乎不能实现较高程度智能化集群式大规模协同编队飞行,因此深入开展信息感知技术、数据融合技术、任务分配技术、航迹规划技术、编队控制技术、通信组网技术和虚拟/实物验证实验平台技术等多项技术的研究,以及多项技术间协同研究,对中国实现美国空军发布的2016年—2036年小型无人机发展规划中“蜂群”、“编组”、“忠诚僚机”和诱饵等多无人机协同编队具有重要指导意义。
协同编队飞行任务描述
为了达到多无人机协同编队飞行的扩大任务范围、提高任务执行效率和完成质量、增强在高危环境中的作战能力、提升系统对环境自适应能力、扩展任务能力等多个目标,必须研究多无人机的状态感知和数据融合、任务分配和航迹规划、编队控制和通信组网等多个技术,并研究多项技术间的协同作用。
多无人机协同编队执行危险任务是一种必然趋势。进行多无人机协同编队,首先要进行信息感知,并对多源信息进行融合;其次对各种任务进行分配和决策;进而对每架无人机进行航迹规划生成期望的轨迹;然后利用先进的编队控制方法和队形设计技术实现多机编队飞行任务;在编队控制设计过程中,需要考虑多无人机之间的组网通信问题;最后,搭建模拟多无人机协同编队飞行虚拟仿真平台和实物演示平台,验证编队控制算法的可行性和有效性。
任务分配
无人机飞行的环境日益复杂及于无人机性能等要求的提高,对无人机编队任务分配的时效性、处理位置环境能力、求解速度等提出了更高的要求。
2010年,美国麻省理工学院大学Mcgrew等,针对固定速度一对一作战机动问题,用近似动态规划技术进行求解,该方法针对快速变化的战术情况能够提供快速响应,并在室内完成了飞行试验,对算法进行了验证。2011年,印度Sujit等。针对两个无人机的未知区域协同搜索问题展开研究,考虑了无人机通信范围、传感器探测范围、油量限制及补给站位置等约束条件,采用博弈论的方法对该问题进行了求解,仿真结果表明基于博弈论的方法对于未知环境的搜索效率很高。2011年,美国波尔图大学ManathARA等,针对多无人机作战的最优资源分配问题,针对多种异构无人机设计了任务分配策略,并采用启发式算法进行求解。2014年,美国珀杜大学Kim等针对异构无人机的编队区域搜索和任务分配问题,提出了一种基于响应阈值模型的概率决策机制的分布式方法,考虑了环境的不确定性,实现了快速灵活的无人机区域搜索和任务分配。2015年马来西亚科技大学Wei等,针对传统粒子群算法求解过程中求解过慢或易陷入局部极小的问题,提出了一种双级任务分配方法,通过双极任务分配结构自适应的条件搜索效率,相比传统粒子群算法提高了求解的可靠性、搜索精度和搜索效率,最终提高了任务分配的求解速度。
航迹规划
为了确保复杂环境中多无人机编队能够安全、快速到达任务区域,降低被敌方雷达捕获、摧毁的概率,需要设计满足一定约束条件及性能指标最优的编队航迹。
2013年,英国诺森比亚大学的Kothari等,采用机会约束方法来处理系统环境和环境态势感知中的不确定性,再通过快速随机搜索树方法获取了多无人机鲁棒最优路径。2015年,北京航空航天大学的段海滨等,将无人机全局路径规划问题转化为三维空间含约束的优化问题,并采用改进的差分进化算法进行求解,克服了传统差分进化算法容易陷入局部极小的问题,相比传统方法提高了无人机路径的约束处理能力、路径质量和鲁棒性。2016年,加拿大魁北克大学的Berger等,针对异构飞行器的静态目标搜索问题,建立新的整数线性和二次规划模型,降低了计算复杂度,采用线性规划算法求解,以轻微的计算代价获得了包含异构飞行器的近似最优解。2016年,沈阳航空航天大学的梁宵等,在复杂环境下对移动目标的路径跟踪问题,采用滚动时域优化结合人工势场法,获取无人机的前进方向,实时给出针对移动目标的最优轨迹。
在实际飞行过程中,需要考虑编队避撞问题。2014年,伊朗伊斯兰阿扎德大学的Shorakaei等,将无人机之间避撞作为性能指标,采用基于概率的环境建模方法,研究了多无人机协同搜索问题,并运用平行遗传算法进行求解,设计了二维及三维的最优路径。遗传算法的优点是易于与其他算法相结合,并充分发挥自身迭代的优势,缺点是运算效率不高,不如蚁群等算法有先天优势。2013年,华中科技大学的丁明跃等,针对海上无人机路径规划问题,提出了一种基于量子行为粒子群优化的混合差分进化算法,用于在不同威胁环境下生成一条安全和可飞的路径。粒子群算法模拟鸟群飞行捕食行为,相比遗传算法规则更为简单,求解速度更快,但容易陷入局部收敛。
编队控制
编队队形设计与调整
队形设计。在实际任务执行中,多无人机以不同的队形形成编队,如楔队、梯队、横队、纵队和V形等,可以实现协同侦察、防御和进攻等复杂任务。合理有效的队形设计可以延长无人机编队飞行距离、节省燃料消耗、增加编队灵活性,这大大提高其安全性与任务完成率。2011年,英国机械工程师协会的报告指出V字队形最高可节省12%的燃料,这种编队模式用于跨洋飞行或长途飞行的客机编队,大大延长了飞行距离并节省燃料消耗。从任务需求的角度出发,新加坡南洋理工大学的朱森强等,针对多无人机固定区域的资源探测问题,设计了一种圆形编队队形,这种队形不仅能扩大探测半径,还能有效提高探测资源区域的效率,有效地完成了多无人机协同探测任务。从编队灵活性出发,2015年,英国贝尔法斯特女王大学Lau等,针对多无人机任意队形设计问题,通过提出基于张拉整体结构队形建模方法,得到多种稳定队形,这种队形构造方法实现了队形的灵活调整,并使多无人机适应了外界环境的变化。
2009年,复旦大学研究团队,指出实际空战中,编队战术通常是以基本的两机编队为单元,按照层级的概念建立起大规模的飞机编队。僚机在长机的前15°到后20°区域形成一字编队队形时,具有良好的攻击性和防御性,适合于高空;僚机在长机后30°到60°的区域时,整体操纵性良好,适合于低空。
编队飞行控制方法
在多无人机编队执行侦察和防御等任务时,需要多无人机保持一定队形编队飞行到任务执行区域。编队保持的控制方法主要有leader-follower方法、基于行为法、虚拟结构法、图论法和基于一致性方法,每种编队方法适应不同环境,各有优缺点。
leader-follower法。Leader-follower方法是目前多无人机编队控制中最常用的方法之一。leader跟踪一个预先给定的轨迹,follower和leader轨迹保持一定构型,并速度达到一致。leader可以看成是目标追踪的对象,或是整个多智能体的共同利益。宾西法尼亚大学的Desai团队对该方法做了大量理论和实验上的研究工作。2012年,该团队Turpin等研究了改进的leader-follower编队方法,其中每架无人机从与之通信的其他无人机中间接获取跟踪的leader的状态。2015年,该团队Saska等,基于机载视觉感知设备和leader-follower方法实现了非GPS定位密集编队飞行。目前,该团队研究还包括多智能体协作规划、避障、协作抓取和运输等理论工作。
基于行为法。基于行为的编队方法是定义无人机的几种基本控制行为,如跟随、避障和队形构成等,对定义的几种行为进行加权得到编队控制方法。这使系统中的每个单体都具备依据自身决策来协同其他单体完成目标或任务的能力。
受生物群体社会行为的启发,越来越多团队通过分析生物系统的行为规律研究多无人机编队飞行。1999年,美国杜克大学Reif等,针对编队中个别成员因故障而失效使得传感器获得的信息传输不完整的问题,提出了一种类似于行为的电势场方法,实现了存在个别成员故障失效情况下的编队。2003年,美国JadbabAIE等,对基于行为法进行了深入的分析,提出了最近邻协调思想。2009年,Kim等,提出了一种基于反馈线性化方法设计的分布式行为控制器。2015年,北京航空航天大学研究团队,提出了一种基于鸽群特性的编队控制方法,该方法利用图论和势场函数理论对编队中的拓扑结构和群体中的主从关系进行定义,实现了对无人机紧密编队飞行的仿真。
在传感器数据错误或缺乏的情况下,基于行为法的多无人机编队能够综合考虑多无人机协同编队飞行中的多个行为,有效整合各种行为,从而使整个编队仍然可以保持。该方法根据预设信息和触发条件来形成控制指令,因此降低了编队的适应性和灵活性。
虚拟结构法。虚拟结构法是一种集中式控制方法,由美国加利福尼亚大学Lewis等,在1997年首次提出。将编队作为一个虚拟刚体,在编队中设定一个虚拟长机或虚拟几何中心,队中所有无人机都参照虚拟长机或虚拟几何中心运动。
2001年,美国杨百翰大学Beard等,针对航天器的编队问题,综合利用虚拟结构、“长机-僚机”及行为方法的合成,实现了航天器在深度空间的编队飞行。2002年,美国加州理工学院Saber等,针对编队队形快速定位及队形稳定问题,提出了基于二维空间的虚拟长机和几何中心的编队结构。
虚拟结构法避免了,领航跟随者方法中领航无人机出现故障或毁机时编队无法保持的缺点。而且该方法通过把编队误差反馈加到控制器,得到了较高的编队控制精度。然而,合成虚拟长机和获取邻机位置,需要较高的通信质量和强计算能力,这使得编队可靠性较差。而且此方法要求编队飞行必须刚性运动,限制了实际飞行的应用范围。
图论法。图论法利用拓扑图上的顶点来描述单个无人机,两点之间的边用来表述无人机间的关联/约束拓扑关系,例如感知、通信或控制连接等,将控制理论引入图中,可以构建编队控制策略。
刚性图论在编队中应用取得了比较大的进展。一般来讲,刚性图处理的对象是无向图,即无人机之间的联系是双向的。在很多实际情况中,为了简洁通信量,多无人机系统常常利用有向图表示。2007年,比利时鲁汶大学Hendrickx等,等提出了有向刚性的概念,给出了有向刚性的定义并给出了生成有向刚性图的策略。该团队在2D刚性图的基础上延伸到3D甚至更高维数,给出高维空间上的刚性图与有向图持久性的充分必要条件。2013年,澳大利亚莫纳什大学Barca等,引入图论到多机器人编队中,完善领航者-追随者的多机器人控制机制,使多机器人形成二维编队而不需要彼此通信。
2016年,美国路易斯安那州立大学Ramazani等,针对不同平面运动个体间的协同控制问题,利用刚性图论分别对单积分和双积分模型进行了协同仿真实验。燕山大学罗小元等,针对多智能体最优刚性编队问题,设计了最优持久编队自动生成算法,生成了最优持久编队。
利用刚性图可以表示任意队形,且图论有成熟的理论作为研究基础,但是仿真研究实现较难。
一致概念最早出现在计算机分布式计算网络化的动态系统中。2004年,美国加利福尼亚大学Saber等,得到多智能体系统一致收敛的充要条件是拓扑图是连通的。2005年,任伟等,证明了有向网络拓扑只要存在生成树结构,则所智能体可实现全局一致收敛。任伟等和Jadbabaie等研究得到动态网络拓扑下多智能体实现一致性收敛的充要条件:在任意时间段的网络拓扑都有一个生成树结构,则多智能体可实现一致性收敛任伟等,进而将一致性控制引入到多智能体编队控制系统中。2009年,韩国首尔大学Seo等,针对多无人机时变编队问题,采用基于一致性反馈线性化方法,保证了多无人机按照给定时变队形进行编队飞行。2013年,东南大学研究团队等通过有限时间一致性算法处理了有领航者和无领航者的编队控制问题。
基于一致性进行分布式大规模编队具有良好的灵活性和适应性,同时编队鲁棒性也不会因某架无人机损伤或毁机而降低。同时改变的是不依赖某一控制单元,并且某架无人机发生故障对整体队形不会有太大影响。但是分布式控制算法比较复杂,对通信信道容量及通信时延的要求较高,目前的所设计的编队控制器不能长时间保障所有无人机收敛到一致状态。
为了避免几种方法缺点,人们提出了很多综合多种方法优点的改进方法。2016年,波兰比亚韦斯托克科技大学Kownacki针对多无人机编队过程中机间通信问题,提出一种结合虚拟结构、leader-follower方法及基于行为的编队方法,提高了无人机编队飞行过程中机间信息共享的可靠性和吞吐量。其他编队控制方法还有模型预测控制、模糊逻辑、神经网络技术、信息感知视觉传感器等方法,可以实现机群间通信不完整情况下编队飞行。
编队重构及避撞
多无人机编队重构包括队形切换及缺少一架或多架无人机时新编队队形的重构,在队形重构过程中必须考虑机间避撞。例如,多无人机编队飞行执行任务时,需要规避雷达、电磁干扰、敌机和较大障碍物,变换合适的队形可以增加任务完成率。实现无人机编队重构的方法有:1)势能域函数方法;2)滚动时域法;3)模型预测法;4)生物算法;5)最优控制法。
2010年,新加坡南洋理工大学Lie等,针对固定翼无人机编队重构控制问题,给出最终的编队位置和重构时间,设计了带有防撞机制的滑模跟踪控制器,最终实现了安全队形重构。2015年,印度特里凡得琅工程学院Rajasree等,针对无障碍物多无人机编队重构问题,通过合适地选择时变编队向量形成任意期望编队,实现了环形编队中一架出现故障时编队的重构情况。2016年,加拿大女王大学Hafez等,针对无人机协同编队重构问题,采用基于学习的模型预测控制方法,实现了无人机形成紧密编队安全绕过静止障碍物。2016年,新加坡国立大学廖峰团队,应用势能域函数方法对垂直起降无人机系统外环设计了编队及重构控制器,又对内环设计鲁棒跟踪控制器,实现了垂直起降无人机编队飞行与重构问题。
在国内,2012年,北京航空航天大学研究团队,采用基于鸽群优化方法,设计了终端状态和控制动作能量约束下的多无人机编队重构控制器,实现了最优的多无人机编队重构。2014年,该团队利用滚动时域方法将多无人机编队全局重构问题转化成几个在线局部最优问题,利用差分进化(DE)算法优化各无人机控制序列,最终使多无人机形成新的队形。2015年,大连理工大学彭会军等,提出了一种新的辛迭代数值算法,以获得最佳的解决方案的非线性滚动时域控制策略,使得多无人机在编队重构过程中更快速形成编队并且对参数具有强鲁棒性。2016年,沈阳航空航天大学研究团队,通过设计编队重构时的安全距离,将编队重构问题转化成带有约束的时间最优控制问题。2016年,景德镇陶瓷学院研究团队等,提出了自主重构的内点算法,将编队重构问题最终转化成标准非线性单目标最优化问题。
其他编队重构的思路还有:2009年,捷克布拉格捷克理工大学Spinka等,设计了一个新的分布式分层结构,实现了故障时遥控自动驾驶多无人机重构;2014年,巴西圣克鲁斯州立大学Giacomin等,提出了一种分段算法,算法重新配置了每架无人机的纬度,并利用导航协助每架无人机完成编队重构。
信息感知与数据融合
无人机通过红外探测仪,摄像机和雷达等机载传感器设备对周围环境进行探测,实现对空地环境的感知,无人机还具有编队内部感知能力,来保持编队构型和实现协同编队飞行,提高多无人机编队安全性和可靠性。无人机将感知信息进行机间共享,通过信息处理与数据融合实现无人机编队协同感知,从而获得更广的探测范围和更加精确全面的环境信息,完成多无人机协同编队侦察等任务。
多无人机编队协同感知必须解决无人机异质传感器多源信息的融合处理问题,实现无人机对环境准确高效的判读。2007年,葡萄牙里斯本技术大学Lima等,针对自主传感器和机器人网络对目标的协同定位问题,采用贝叶斯方法解决多传感器信息融合问题以及广义传感器网络自身状态估计问题,提升了对观测目标协同定位的精确度。2008年,美国蒙特里海军研究生院Lee,针对多传感器信息融合问题,提出了一种新的不确定信息滤波器算法,该算法通过统计线性误差传播方法处理不确定数据,得到了未知信息的不确定性程度。2010年,国防科学技术大学王林等,针对多移动传感器测量的融合估计问题,基于无色变换、交互多模型和信息滤波算法,提出了一种面向多无人机协同感知的分布式融合估计方法,而且无色变换能保证更高的估计精度,可以提高多无人机的融合估计性能。
无人机将感知信息进行机间共享,通过信息处理和数据融合技术实现无人机编队协同感知,从而获得更广的探测范围和更加精确全面的环境信息。2003年,澳大利亚悉尼大学Ridley等,在其专著里面设计了一种实时分布式机载数据融合系统,包括视觉传感器和毫米波雷达,实现了对多个地面目标进行跟踪。2007年,美国康奈尔大学Campbell等,针对多无人机的目标跟踪问题,提出了一种基于平方根的sigma-point信息滤波算法,该算法通过数据融合实现了两架无人机的目标跟踪,并且该算法在数据丢失和出现延时也能提供准确信息,具有高实时性和强鲁棒性。2008年,西安电子科技大学杨百胜等,针对多传感器融合跟踪问题,采用多个被动传感器集中式融合跟踪策略,提出了基于无迹卡尔曼滤波的被动多传感器融合跟踪算法,进行了3个被动站跟踪的仿真研究,验证了其算法比传统EKF方法的跟踪精度更高。
编队通信
目前,多数国家仍采用地面站直接控制无人机,构建一种星型拓扑结构。多无人机通信组网的思想是:无人机不完全依赖地面站或卫星等设施的控制,将所有无人机看作一个整体,在多无人机间建立一个无线通信网络,各无人机间相互配合,相互转发指令、交换信息。该网络打破了无人机之间没有任何联系与合作的传统作战思想,可以提高无人机的综合作战能力,减小作战能耗。
2011年,澳大利亚新南威尔士大学Ahmed等,针对无人机与地面站、无人机与无人机之间的链路特性进行研究,为多无人机通信组网的设计提供了基础。2013年,土耳其空军学院Bekmezci等,从节点移动性、节点密度、拓扑变化频率和功耗等方面,介绍了飞行自组网不同于其他自组织网络,并分层总结了飞行自组网的相关协议。2016年,美国华盛顿大学Gupta等,研究了现有技术应用于航空网络存在的问题,通过调研现有技术对航空网络的可用性,研讨了各种技术的优缺点,并从路由、无缝切换和节能领域进行了详细分析
编队仿真平台
搭建满足多无人机协同编队仿真的多无人机仿真平台,对于加快开发周期,降低多无人机编队试验成本,具有十分重要的意义。当前国内外已有一些针对无人机编队或多无人机仿真系统的研究,主要分为如下4类。
单系统仿真平台。利用C++开发出了Multi无人机2系统,用于协同控制研究。美国陆军研究所Garcia基于商用飞行模拟器软件 X-Plane和MATLAB开发的多无人机仿真平台,实现了4台无人机编队仿真。清华大学周昊等,基于多 Agent 技术开发出了名为无人机sim的仿真平台,采用分层的体系结构,在单系统内将算法、内核和显示完全分离,实现了多无人机的仿真, 此类系统成本较低,又可以验证无人机机群控制及协同规划算法,但与真实无人机编队的分布式体系结构不符,不能有效仿真无人机编队协同任务规划的全过程。
基于 HLA(high level arcHitecture)架构的分布式系统仿真平台。HLA是由美国国防部在90年代末提出的,是目前分布式系统仿真的主要技术之一。基于 HLA 的仿真不需要处理底层通信传输、仿真运行管理的细节,实验者可将主要精力放在具体的仿真功能实现上。部分公司开发出基于HLA 的仿真平台,比如 VR-Forces、 FLAMES等,它们对底层的RTI进行了封装,提供了更加灵活强大的 API 函数,降低了开发难度。合肥工业大学研究团队开发出了基于VR-Force的分布式的无人机编队协同任务规划仿真系统,能够仿真多种任务场景下的无人机编队协同任务规划过程,以帮助验证不同类型的协同任务规划算法,仿真展示度高,但是也带来了较高的建设成本。
自主开发的多飞行器编队分布式虚拟系统仿真平台。该类平台是对除了HLA架构以外所有的分布式仿真平台的概括。天津大学研究团队开发的多飞行器编队仿真平台,由模型计算机、系统主控计算机、视景显示计算机、PC104控制器、无线AP/路由器以及Wi-Fi无线通信模块组成。模型计算机采用xPC仿真环境,运行单飞行器动力学以及环境模型;系统主控计算机发出任务指令,并监控整个系统的运行;视景显示计算机实时地进行视景显示;PC104控制器运行飞行控制算法,实现对单飞行器的控制;无线AP/路由器作为系统无线网络的中转站,实现信息交换;Wi-Fi无线通信模块使有线通信方式转为无线连接。实现了对于多飞行器编队系统的实时仿真、视景显示、算法验证、通信组网等功能. 该团队突破了xPC平台和dSPACE平台两项关键技术, 实现了对于多无人机编队飞行控制算法的半实物仿真验证与性能评估。此类平台灵活度较大,可以有效对协同控制算法和轨迹优化算法进行仿真验证,但内部通信机制和管理机制的搭建,需要自主研发,具有一定难度。
整自主开发的多无人机编队分布实物系统仿真平台,整个系统由室内定位系统、多无人机、ZigBee无线传输以及地面站组成。首先室内定位系统借助红外摄像头对各无人机上的标记点进行抓拍,通过解算实时地计算出每架无人机的当前位置,并以TCP/IP协议的方式传送给地面站;地面站借助ROS通信机制,在接收定位系统数据的同时运行相关决策算法,计算出每架无人机下一时刻的期望位置,并通过ZigBee无线通信发送出去;无人机通讯网络以分布式、自组网的形式进行搭建,每架无人机均可与地面站通信,同时彼此间也可以进行数据交互;各无人机接收地面站传来的数据,提取自身当前位置与期望位置,运行机载控制算法,驱动无人机运动到设定的位置,如此循环往复,最终实现多无人机编队飞行的仿真验证。目前该平台已突破XBEE分布式网络和PIXHAWK开源飞控两项关键技术,并成功嵌入人工势场法、图论法等编队理论算法。在室内也已实现定点、直线、圆等常用队形演示,同时在飞行过程中可实时对无人机编队进行队形切换. 该平台可以为多无人机飞行过程算法提供数据支持,并可以直接充当演示效果。所以,该平台可以很好的为理论研究服务,避免不必要的经费投入。
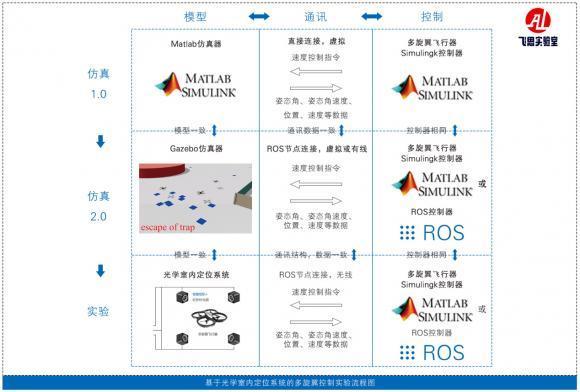
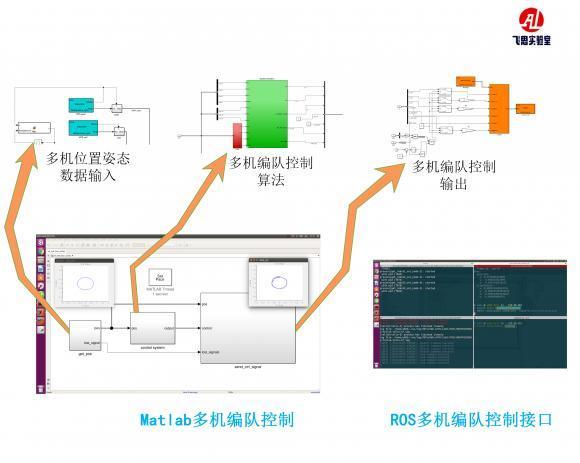
正如,飞思实验室研发的这款基于室内光学定位系统的室内多旋翼控制平台,不仅实现了室内无人机集群飞行、集群算法、编队通信原理等教学实验,能够更有效的帮助教研工作者,专注于无人机多机协同编队等无人机集群关键技术研究,检验理论成果,提升实验效率,更能大大推动教学研一体化进程,加速教学、科研的进度。而且它是基于Matlab或ROS的飞行场景仿真器可较真实模拟真实飞行器的动态,并且可模拟节点通讯方式,方便后续仿真。Matlab或ROS的地面控制站可实时读取基于ROS的飞行场景仿真器、光学室内定位系统节点,还能读写真实多旋翼飞行器节点,从而能够在Matlab或ROS平台下统一地从仿真到真实实验,最终轻松完成多旋翼飞行器的控制。

可开设课程多样化:
多旋翼滤波器设计;
多旋翼定点位置控制器设计;
多旋翼路径跟随控制器设计;
多旋翼跟踪控制器设计;
多旋翼避障控制器设计;
多旋翼区域覆盖决策设计;
多机编队控制设计;
多机投递决策设计。
系统组成:
光学室内定位系统多旋翼飞行器
基于Matlab或ROS的编队控制站
实验指导包(指导书、视频、例程)
系统特点:
平台统一,高效易用,强势助力科研
身材Mini续航久,与平台完美兼容
权威教科书级指导,制定行业标准
视频和例程由浅入深,轻松上手
结论与展望
通过对近年来国内外多无人机协同编队飞行控制几个关键技术的进展的综述,同时展望了每种关键技术发展趋势,具体得出以下结论:
1)现有的任务分配和航迹规划主要针对离线无人机编队任务分配和航迹规划展开研究,未来研究应围绕复杂环境及有限通信环境下的无人机编队实时任务分配和多异构无人机编队实时协同航迹规划展开。
2)多无人机编队飞行的控制方法大部分实现了2维编队,对于3维立体编队的编队控制策略研究很少。如何综合利用各种编队控制方法的优点,实现多无人机在复杂环境和突发情况下的编队形成、保持与重构,是未来研究者所要追寻的目标。
3)针对无人机多传感器数据融合问题的研究与实现主要停留在单个无人机携带的多传感器进行数据融合,而对多无人机编队所携带的多传感器数据融合问题的研究较少,且大多停留在理论与算法研究上。如何通过合理利用多无人机编队的多传感器进行协同感知,扩大感知范围,提升感知精度,是未来多无人机编队需要研究重点问题。
4)编队间的通信研究都是针对某一性能进行的改进,仍停留在理论层面,没有应用在实际工程中;未来需要结合现有移动自组网技术建立通信标准构建无人机自组织网络,实现无人机与其他平台的互联互通。
5)仿真平台大部分是对已有算法的仿真和验证,对多无人机编队飞行实物演示验证较少。编队仿真平台应以分布式结构为主流,针对实物硬件及虚拟软件环境进行系统集成,推动并简化计算,以便更好地适应多核技术迅速发展的背景。
总之,多无人机协同编队飞行控制的理论虽然取得了丰富成果,但是随着环境日益复杂和任务的多种多样,各种多无人机协同编队飞行关键技术也需要迅速发展。未来会出现异构多无人机之间的协同编队,并且通信环境会异常复杂,感知约束也会随环境的复杂而增大,迫切需要开展在感知约束和复杂通信环境下的强鲁棒、高精度编队控制设计研究。